 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-planar 2D-U-Net Segmentation of 3D-CT Abdominal Organs augmented by Spatial Occurrence Maps
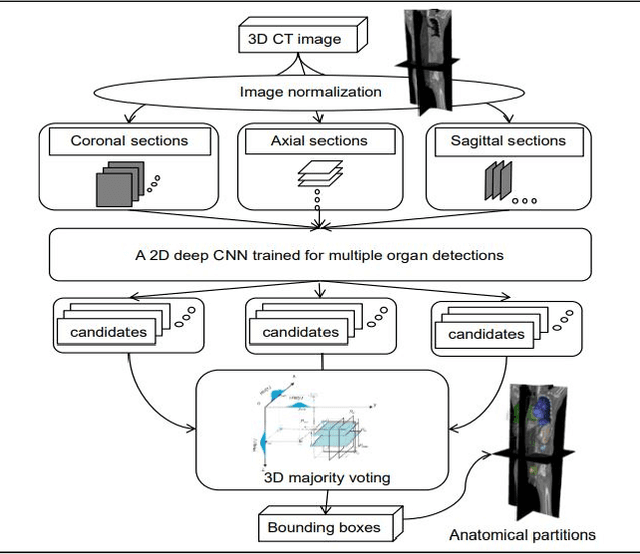
Jun 05, 2026This work proposes a lightweight 2D-U-Net-based framework for segmenting five abdominal organs in large field-of-view 3D CT scans. The method combines coarse-to-fine segmentation, predictions from multiple anatomical planes, and additional fuzzy 3D spatial maps that provide anatomical location cues to improve segmentation accuracy. We combine multi-planar 2D-U-Net models augmented by a spatial occurrence map. The approach involves two main stages. First, the abdominal volume of interest region is detected by traversing the whole scan axially with a 2D-U-Net and determining the x-y-z-minimum and -maximum extents of the 5 abdominal organs of interest. Second, we use spatial occurrence maps to enhance our multi-planar 2D-U-net architecture inside the bounds from the former stage. The method is evaluated on 80 CT scans from various public sources. The results show Dice improvements of about 4% at maximum compared to the same model trained without spatial occurrence maps.
3D Bounding Box Detection in Volumetric Medical Image Data: A Systematic Literature Review
Dec 10, 2020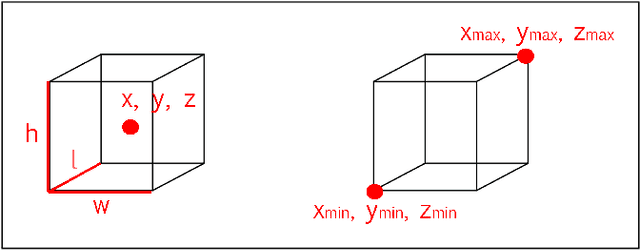
This paper discusses current methods and trends for 3D bounding box detection in volumetric medical image data. For this purpose, an overview of relevant papers from recent years is given. 2D and 3D implementations are discussed and compared. Multiple identified approaches for localizing anatomical structures are presented. The results show that most research recently focuses on Deep Learning methods, such as Convolutional Neural Networks vs. methods with manual feature engineering, e.g. Random-Regression-Forests. An overview of bounding box detection options is presented and helps researchers to select the most promising approach for their target objects.
* 10 pages, 5 figures, 1 table