 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFUSE: A Flow-based Mapping Between Shapes
Nov 17, 2025



We introduce a novel neural representation for maps between 3D shapes based on flow-matching models, which is computationally efficient and supports cross-representation shape matching without large-scale training or data-driven procedures. 3D shapes are represented as the probability distribution induced by a continuous and invertible flow mapping from a fixed anchor distribution. Given a source and a target shape, the composition of the inverse flow (source to anchor) with the forward flow (anchor to target), we continuously map points between the two surfaces. By encoding the shapes with a pointwise task-tailored embedding, this construction provides an invertible and modality-agnostic representation of maps between shapes across point clouds, meshes, signed distance fields (SDFs), and volumetric data. The resulting representation consistently achieves high coverage and accuracy across diverse benchmarks and challenging settings in shape matching. Beyond shape matching, our framework shows promising results in other tasks, including UV mapping and registration of raw point cloud scans of human bodies.
Model-based Metric 3D Shape and Motion Reconstruction of Wild Bottlenose Dolphins in Drone-Shot Videos
Apr 22, 2025



We address the problem of estimating the metric 3D shape and motion of wild dolphins from monocular video, with the aim of assessing their body condition. While considerable progress has been made in reconstructing 3D models of terrestrial quadrupeds, aquatic animals remain unexplored due to the difficulty of observing them in their natural underwater environment. To address this, we propose a model-based approach that incorporates a transmission model to account for water-induced occlusion. We apply our method to video captured under different sea conditions. We estimate mass and volume, and compare our results to a manual 2D measurements-based method.
$C^2M^3$: Cycle-Consistent Multi-Model Merging
May 28, 2024



In this paper, we present a novel data-free method for merging neural networks in weight space. Differently from most existing works, our method optimizes for the permutations of network neurons globally across all layers. This allows us to enforce cycle consistency of the permutations when merging $N \geq 3$ models, allowing circular compositions of permutations to be computed without accumulating error along the path. We qualitatively and quantitatively motivate the need for such a constraint, showing its benefits when merging sets of models in scenarios spanning varying architectures and datasets. We finally show that, when coupled with activation renormalization, our approach yields the best results in the task.
Implicit-ARAP: Efficient Handle-Guided Deformation of High-Resolution Meshes and Neural Fields via Local Patch Meshing
May 21, 2024



In this work, we present the local patch mesh representation for neural signed distance fields. This technique allows to discretize local regions of the level sets of an input SDF by projecting and deforming flat patch meshes onto the level set surface, using exclusively the SDF information and its gradient. Our analysis reveals this method to be more accurate than the standard marching cubes algorithm for approximating the implicit surface. Then, we apply this representation in the setting of handle-guided deformation: we introduce two distinct pipelines, which make use of 3D neural fields to compute As-Rigid-As-Possible deformations of both high-resolution meshes and neural fields under a given set of constraints. We run a comprehensive evaluation of our method and various baselines for neural field and mesh deformation which show both pipelines achieve impressive efficiency and notable improvements in terms of quality of results and robustness. With our novel pipeline, we introduce a scalable approach to solve a well-established geometry processing problem on high-resolution meshes, and pave the way for extending other geometric tasks to the domain of implicit surfaces via local patch meshing.
GSEdit: Efficient Text-Guided Editing of 3D Objects via Gaussian Splatting
Mar 08, 2024



We present GSEdit, a pipeline for text-guided 3D object editing based on Gaussian Splatting models. Our method enables the editing of the style and appearance of 3D objects without altering their main details, all in a matter of minutes on consumer hardware. We tackle the problem by leveraging Gaussian splatting to represent 3D scenes, and we optimize the model while progressively varying the image supervision by means of a pretrained image-based diffusion model. The input object may be given as a 3D triangular mesh, or directly provided as Gaussians from a generative model such as DreamGaussian. GSEdit ensures consistency across different viewpoints, maintaining the integrity of the original object's information. Compared to previously proposed methods relying on NeRF-like MLP models, GSEdit stands out for its efficiency, making 3D editing tasks much faster. Our editing process is refined via the application of the SDS loss, ensuring that our edits are both precise and accurate. Our comprehensive evaluation demonstrates that GSEdit effectively alters object shape and appearance following the given textual instructions while preserving their coherence and detail.
Fluid Dynamics Network: Topology-Agnostic 4D Reconstruction via Fluid Dynamics Priors
Mar 17, 2023



Representing 3D surfaces as level sets of continuous functions over $\mathbb{R}^3$ is the common denominator of neural implicit representations, which recently enabled remarkable progress in geometric deep learning and computer vision tasks. In order to represent 3D motion within this framework, it is often assumed (either explicitly or implicitly) that the transformations which a surface may undergo are homeomorphic: this is not necessarily true, for instance, in the case of fluid dynamics. In order to represent more general classes of deformations, we propose to apply this theoretical framework as regularizers for the optimization of simple 4D implicit functions (such as signed distance fields). We show that our representation is capable of capturing both homeomorphic and topology-changing deformations, while also defining correspondences over the continuously-reconstructed surfaces.
KiloNeuS: Implicit Neural Representations with Real-Time Global Illumination
Jun 22, 2022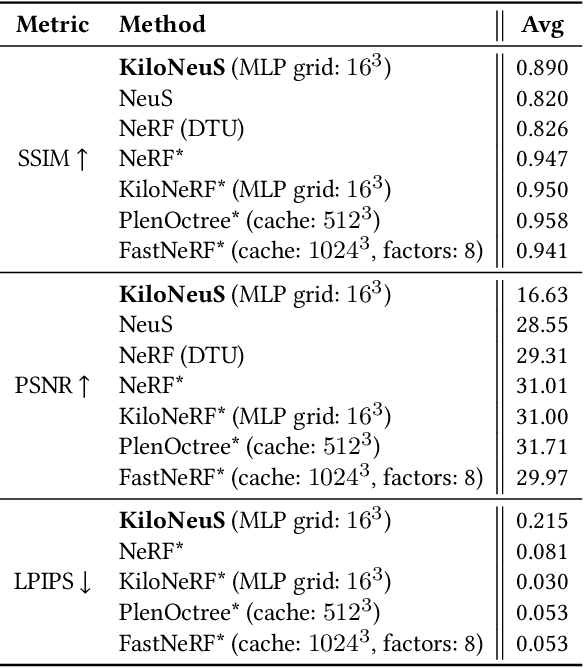
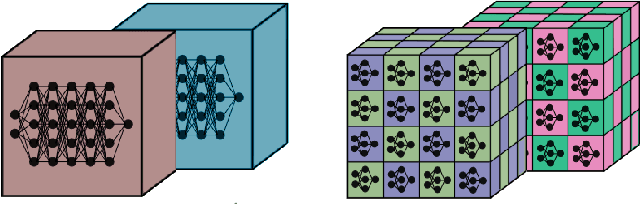
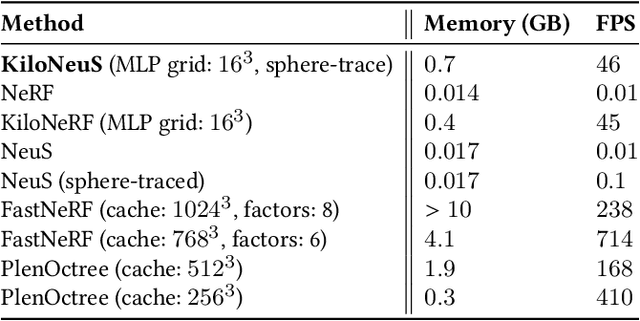
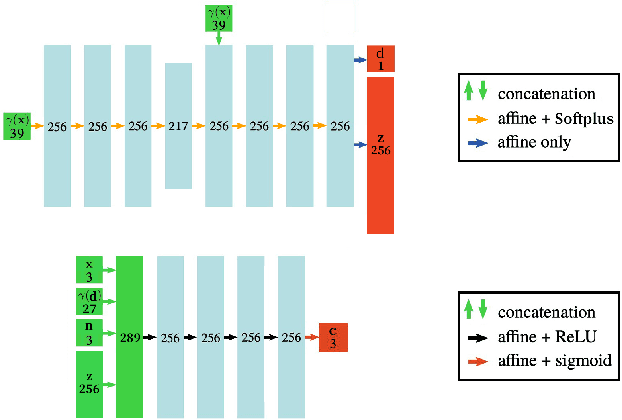
The latest trends in inverse rendering techniques for reconstruction use neural networks to learn 3D representations as neural fields. NeRF-based techniques fit multi-layer perceptrons (MLPs) to a set of training images to estimate a radiance field which can then be rendered from any virtual camera by means of volume rendering algorithms. Major drawbacks of these representations are the lack of well-defined surfaces and non-interactive rendering times, as wide and deep MLPs must be queried millions of times per single frame. These limitations have recently been singularly overcome, but managing to accomplish this simultaneously opens up new use cases. We present KiloNeuS, a new neural object representation that can be rendered in path-traced scenes at interactive frame rates. KiloNeuS enables the simulation of realistic light interactions between neural and classic primitives in shared scenes, and it demonstrably performs in real-time with plenty of room for future optimizations and extensions.