 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ontology-driven Dynamic Knowledge Base for Uninhabited Ground Vehicles
Feb 11, 2026In this paper, the concept of Dynamic Contextual Mission Data (DCMD) is introduced to develop an ontology-driven dynamic knowledge base for Uninhabited Ground Vehicles (UGVs) at the tactical edge. The dynamic knowledge base with DCMD is added to the UGVs to: support enhanced situation awareness; improve autonomous decision making; and facilitate agility within complex and dynamic environments. As UGVs are heavily reliant on the a priori information added pre-mission, unexpected occurrences during a mission can cause identification ambiguities and require increased levels of user input. Updating this a priori information with contextual information can help UGVs realise their full potential. To address this, the dynamic knowledge base was designed using an ontology-driven representation, supported by near real-time information acquisition and analysis, to provide in-mission on-platform DCMD updates. This was implemented on a team of four UGVs that executed a laboratory based surveillance mission. The results showed that the ontology-driven dynamic representation of the UGV operational environment was machine actionable, producing contextual information to support a successful and timely mission, and contributed directly to the situation awareness.
* 10 pages, 11 figures, 2025 Australasian Conference on Robotics and Automation (ACRA 2025)
On-the-fly 3D metrology of volumetric additive manufacturing
Feb 07, 2022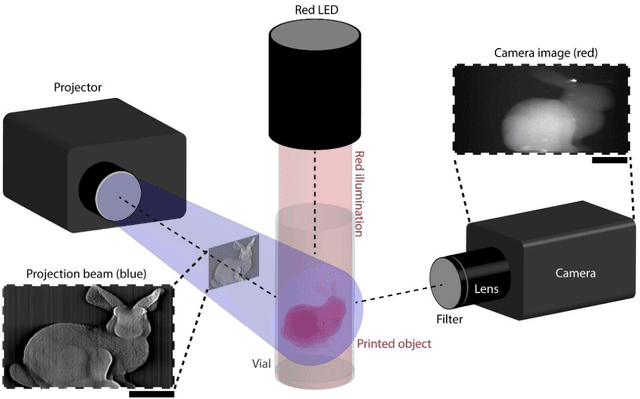
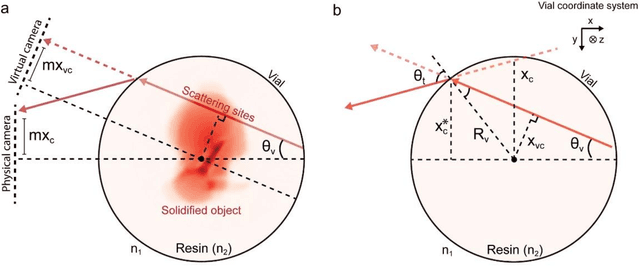
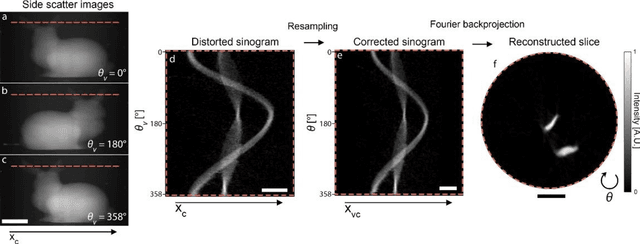
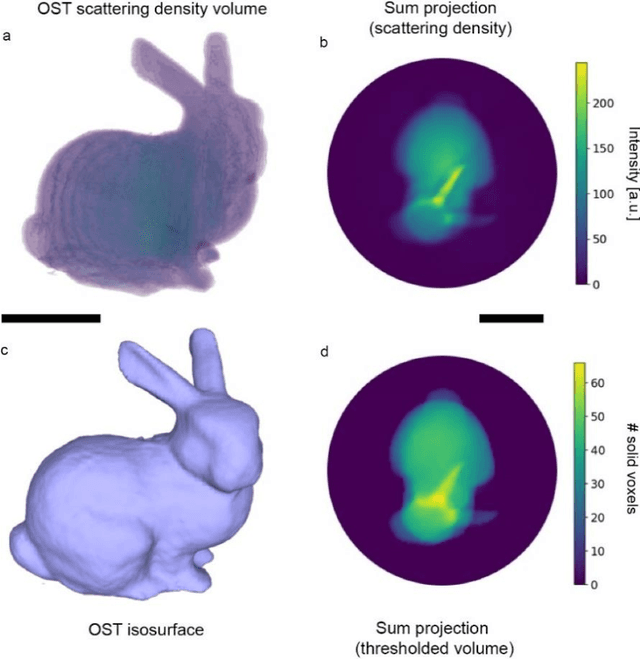
Additive manufacturing techniques are revolutionizing product development by enabling fast turnaround from design to fabrication. However, the throughput of the rapid prototyping pipeline remains constrained by print optimization, requiring multiple iterations of fabrication and ex-situ metrology. Despite the need for a suitable technology, robust in-situ shape measurement of an entire print is not currently available with any additive manufacturing modality. Here, we address this shortcoming by demonstrating fully simultaneous 3D metrology and printing. We exploit the dramatic increase in light scattering by a photoresin during gelation for real-time 3D imaging of prints during tomographic volumetric additive manufacturing. Tomographic imaging of the light scattering density in the build volume yields quantitative, artifact-free 3D + time models of cured objects that are accurate to below 1% of the size of the print. By integrating shape measurement into the printing process, our work paves the way for next-generation rapid prototyping with real-time defect detection and correction.