 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeriMESA: Consensus ADMM for Real-World Collaborative SLAM
Mar 01, 2026Collaborative Simultaneous Localization and Mapping (C-SLAM) is a fundamental capability for multi-robot teams as it enables downstream tasks like planning and navigation. However, existing C-SLAM back-end algorithms that are required to solve this problem struggle to address the practical realities of real-world deployments (i.e. communication limitations, outlier measurements, and online operation). In this paper we propose Robust Incremental Manifold Edge-based Separable ADMM (riMESA) -- a robust, incremental, and distributed C-SLAM back-end that is resilient to outliers, reliable in the face of limited communication, and can compute accurate state estimates for a multi-robot team in real-time. Through the development of riMESA, we, more broadly, make an argument for the use of Consensus Alternating Direction Method of Multipliers as a theoretical foundation for distributed optimization tasks in robotics like C-SLAM due to its flexibility, accuracy, and fast convergence. We conclude this work with an in-depth evaluation of riMESA on a variety of C-SLAM problem scenarios and communication network conditions using both synthetic and real-world C-SLAM data. These experiments demonstrate that riMESA is able to generalize across conditions, produce accurate state estimates, operate in real-time, and outperform the accuracy of prior works by a factor >7x on real-world datasets.
iMESA: Incremental Distributed Optimization for Collaborative Simultaneous Localization and Mapping
Jun 11, 2024



This paper introduces a novel incremental distributed back-end algorithm for Collaborative Simultaneous Localization and Mapping (C-SLAM). For real-world deployments, robotic teams require algorithms to compute a consistent state estimate accurately, within online runtime constraints, and with potentially limited communication. Existing centralized, decentralized, and distributed approaches to solving C-SLAM problems struggle to achieve all of these goals. To address this capability gap, we present Incremental Manifold Edge-based Separable ADMM (iMESA) a fully distributed C-SLAM back-end algorithm that can provide a multi-robot team with accurate state estimates in real-time with only sparse pair-wise communication between robots. Extensive evaluation on real and synthetic data demonstrates that iMESA is able to outperform comparable state-of-the-art C-SLAM back-ends.
Asynchronous Distributed Smoothing and Mapping via On-Manifold Consensus ADMM
Oct 18, 2023



In this paper we present a fully distributed, asynchronous, and general purpose optimization algorithm for Consensus Simultaneous Localization and Mapping (CSLAM). Multi-robot teams require that agents have timely and accurate solutions to their state as well as the states of the other robots in the team. To optimize this solution we develop a CSLAM back-end based on Consensus ADMM called MESA (Manifold, Edge-based, Separable ADMM). MESA is fully distributed to tolerate failures of individual robots, asynchronous to tolerate practical network conditions, and general purpose to handle any CSLAM problem formulation. We demonstrate that MESA exhibits superior convergence rates and accuracy compare to existing state-of-the art CSLAM back-end optimizers.
Robust Incremental Smoothing and Mapping (riSAM)
Sep 28, 2022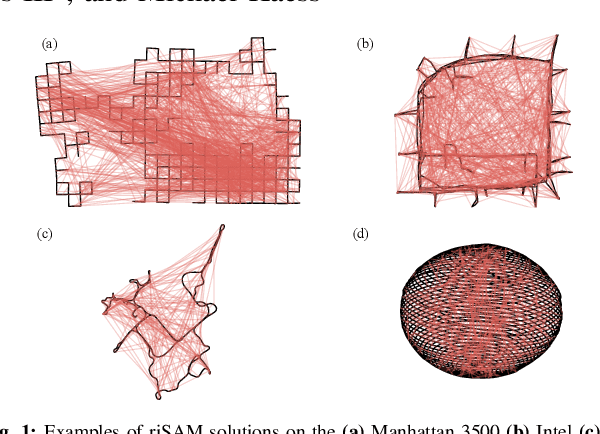
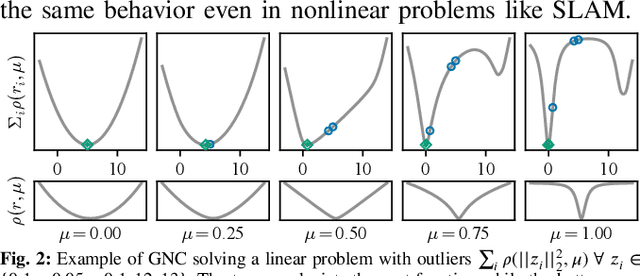
This paper presents a method for robust optimization for online incremental Simultaneous Localization and Mapping (SLAM). Due to the NP-Hardness of data association in the presence of perceptual aliasing, tractable (approximate) approaches to data association will produce erroneous measurements. We require SLAM back-ends that can converge to accurate solutions in the presence of outlier measurements while meeting online efficiency constraints. Existing robust SLAM methods either remain sensitive to outliers, become increasingly sensitive to initialization, or fail to provide online efficiency. We present the robust incremental Smoothing and Mapping (riSAM) algorithm, a robust back-end optimizer for incremental SLAM based on Graduated Non-Convexity. We demonstrate on benchmarking datasets that our algorithm achieves online efficiency, outperforms existing online approaches, and matches or improves the performance of existing offline methods.