 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Continuous System Integration for Critical Deep-Sea Robot Operations Using Knowledge-Enabled Simulation in the Loop
Jul 18, 2018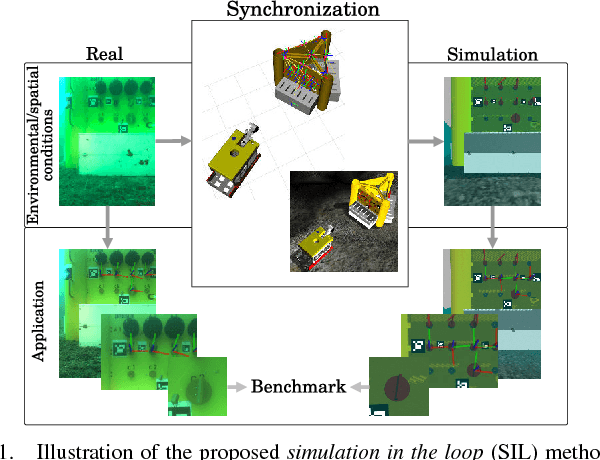
Deep-sea robot operations demand a high level of safety, efficiency and reliability. As a consequence, measures within the development stage have to be implemented to extensively evaluate and benchmark system components ranging from data acquisition, perception and localization to control. We present an approach based on high-fidelity simulation that embeds spatial and environmental conditions from recorded real-world data. This simulation in the loop (SIL) methodology allows for mitigating the discrepancy between simulation and real-world conditions, e.g. regarding sensor noise. As a result, this work provides a platform to thoroughly investigate and benchmark behaviors of system components concurrently under real and simulated conditions. The conducted evaluation shows the benefit of the proposed work in tasks related to perception and self-localization under changing spatial and environmental conditions.
* published on IROS 2018