 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Navigation Scheme for Optimal Deep-Sea Localization Using Multimodal Perception Cues
Jun 12, 2019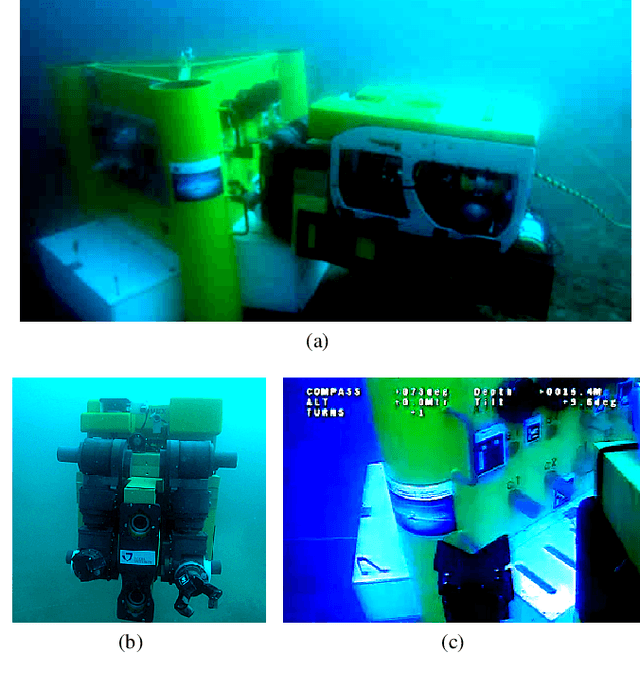
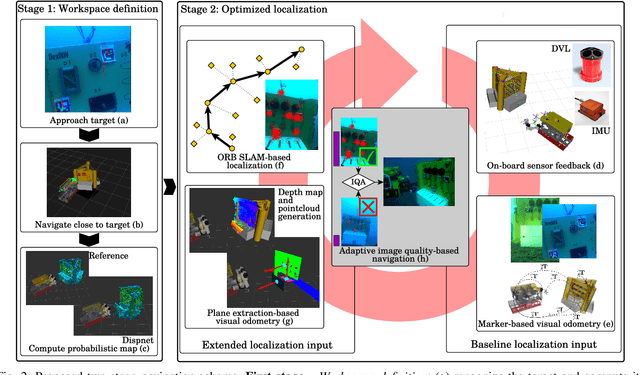
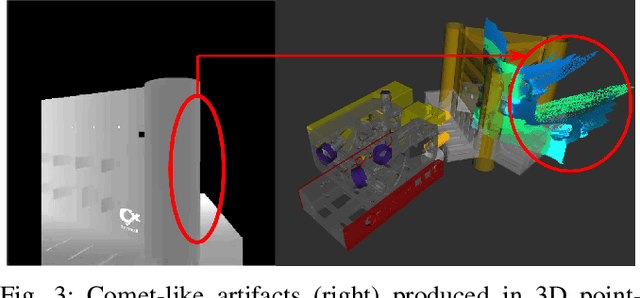
Underwater robot interventions require a high level of safety and reliability. A major challenge to address is a robust and accurate acquisition of localization estimates, as it is a prerequisite to enable more complex tasks, e.g. floating manipulation and mapping. State-of-the-art navigation in commercial operations, such as oil & gas production (OGP), rely on costly instrumentation. These can be partially replaced or assisted by visual navigation methods, especially in deep-sea scenarios where equipment deployment has high costs and risks. Our work presents a multimodal approach that adapts state-of-the-art methods from on-land robotics, i.e., dense point cloud generation in combination with plane representation and registration, to boost underwater localization performance. A two-stage navigation scheme is proposed that initially generates a coarse probabilistic map of the workspace, which is used to filter noise from computed point clouds and planes in the second stage. Furthermore, an adaptive decision-making approach is introduced that determines which perception cues to incorporate into the localization filter to optimize accuracy and computation performance. Our approach is investigated first in simulation and then validated with data from field trials in OGP monitoring and maintenance scenarios.
Improved Fourier Mellin Invariant for Robust Rotation Estimation with Omni-cameras
Feb 12, 2019
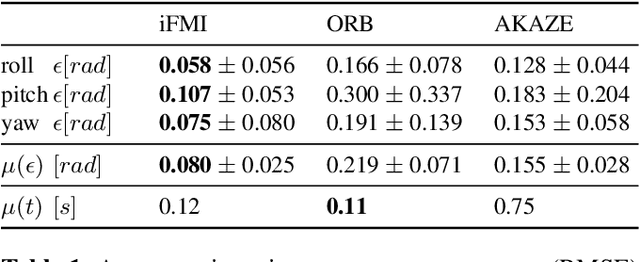
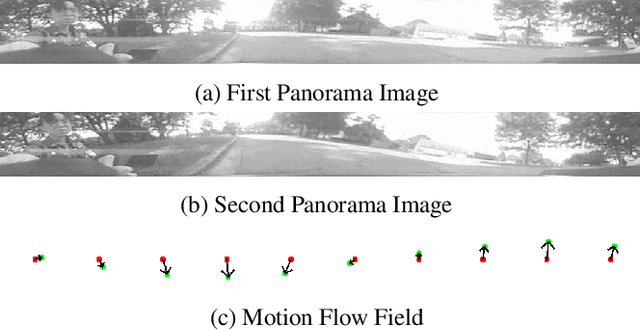
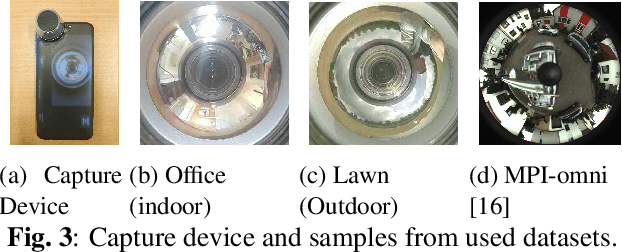
Spectral methods such as the improved Fourier Mellin Invariant (iFMI) transform have proved faster, more robust and accurate than feature based methods on image registration. However, iFMI is restricted to work only when the camera moves in 2D space and has not been applied on omni-cameras images so far. In this work, we extend the iFMI method and apply a motion model to estimate an omni-camera's pose when it moves in 3D space. This is particularly useful in field robotics applications to get a rapid and comprehensive view of unstructured environments, and to estimate robustly the robot pose. In the experiment section, we compared the extended iFMI method against ORB and AKAZE feature based approaches on three datasets showing different type of environments: office, lawn and urban scenery (MPI-omni dataset). The results show that our method boosts the accuracy of the robot pose estimation two to four times with respect to the feature registration techniques, while offering lower processing times. Furthermore, the iFMI approach presents the best performance against motion blur typically present in mobile robotics.
Robust Gesture-Based Communication for Underwater Human-Robot Interaction in the context of Search and Rescue Diver Missions
Oct 16, 2018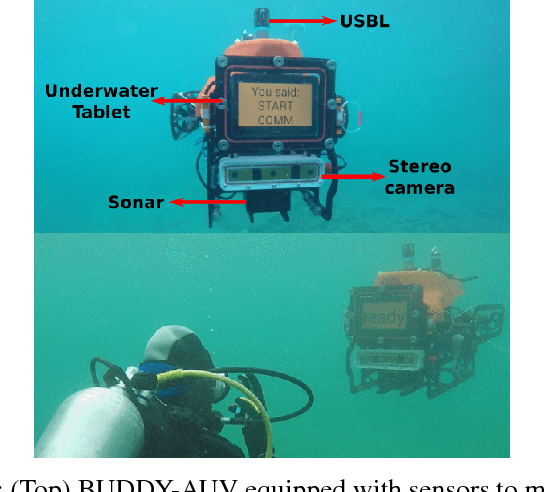
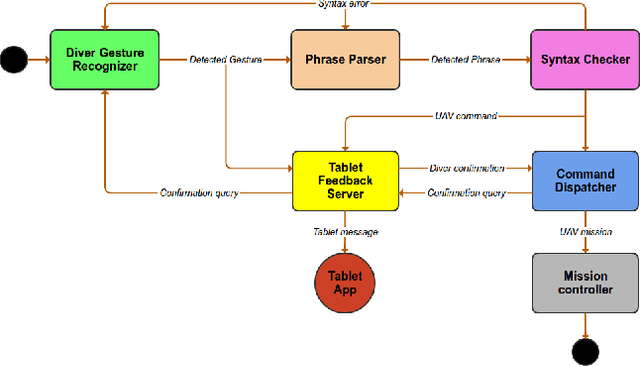
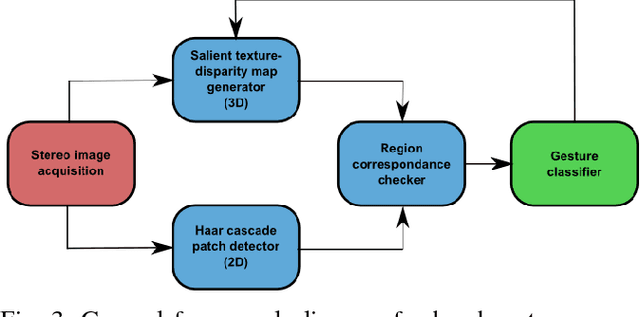
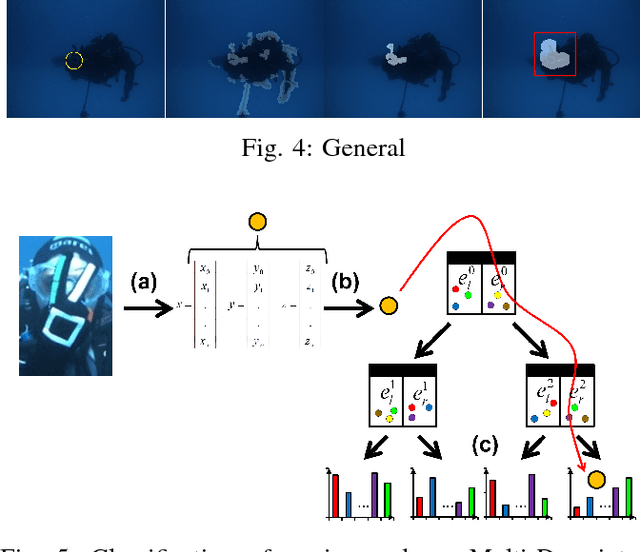
We propose a robust gesture-based communication pipeline for divers to instruct an Autonomous Underwater Vehicle (AUV) to assist them in performing high-risk tasks and helping in case of emergency. A gesture communication language (CADDIAN) is developed, based on consolidated and standardized diver gestures, including an alphabet, syntax and semantics, ensuring a logical consistency. A hierarchical classification approach is introduced for hand gesture recognition based on stereo imagery and multi-descriptor aggregation to specifically cope with underwater image artifacts, e.g. light backscatter or color attenuation. Once the classification task is finished, a syntax check is performed to filter out invalid command sequences sent by the diver or generated by errors in the classifier. Throughout this process, the diver receives constant feedback from an underwater tablet to acknowledge or abort the mission at any time. The objective is to prevent the AUV from executing unnecessary, infeasible or potentially harmful motions. Experimental results under different environmental conditions in archaeological exploration and bridge inspection applications show that the system performs well in the field.
Robust Continuous System Integration for Critical Deep-Sea Robot Operations Using Knowledge-Enabled Simulation in the Loop
Jul 18, 2018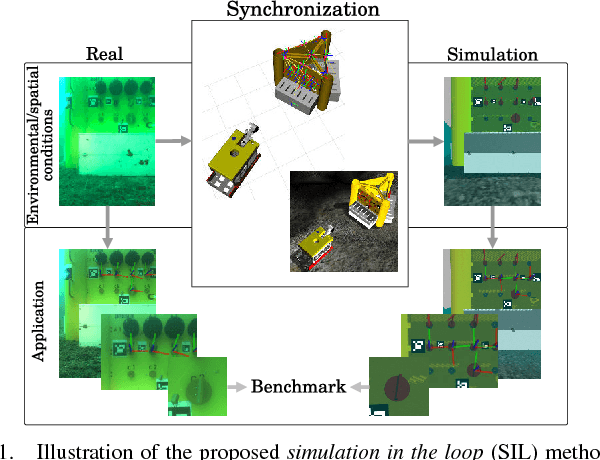
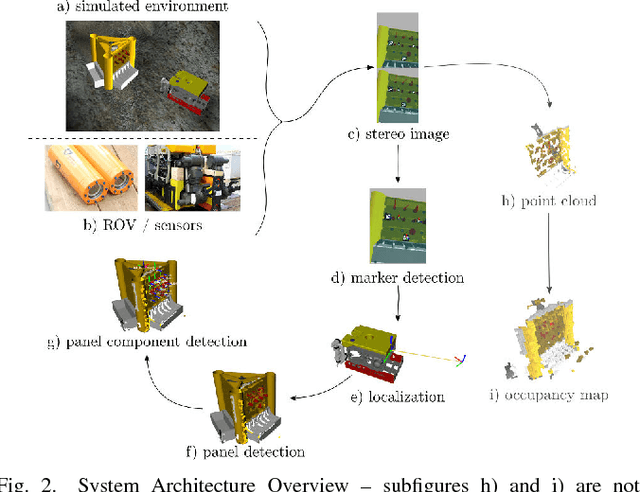
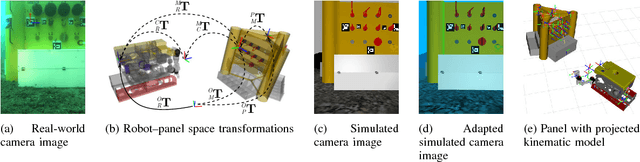
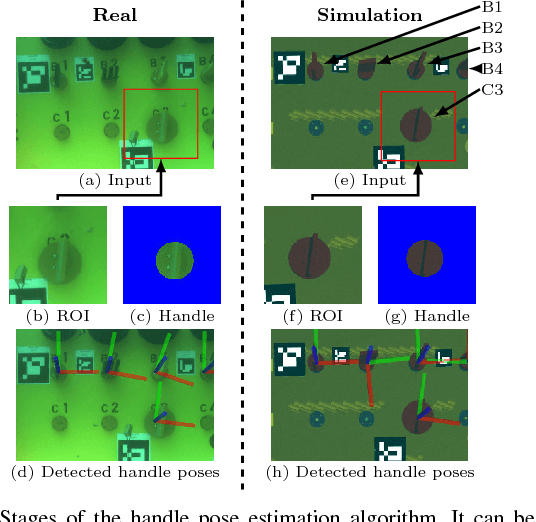
Deep-sea robot operations demand a high level of safety, efficiency and reliability. As a consequence, measures within the development stage have to be implemented to extensively evaluate and benchmark system components ranging from data acquisition, perception and localization to control. We present an approach based on high-fidelity simulation that embeds spatial and environmental conditions from recorded real-world data. This simulation in the loop (SIL) methodology allows for mitigating the discrepancy between simulation and real-world conditions, e.g. regarding sensor noise. As a result, this work provides a platform to thoroughly investigate and benchmark behaviors of system components concurrently under real and simulated conditions. The conducted evaluation shows the benefit of the proposed work in tasks related to perception and self-localization under changing spatial and environmental conditions.
* published on IROS 2018
CADDY Underwater Stereo-Vision Dataset for Human-Robot Interaction (HRI) in the Context of Diver Activities
Jul 12, 2018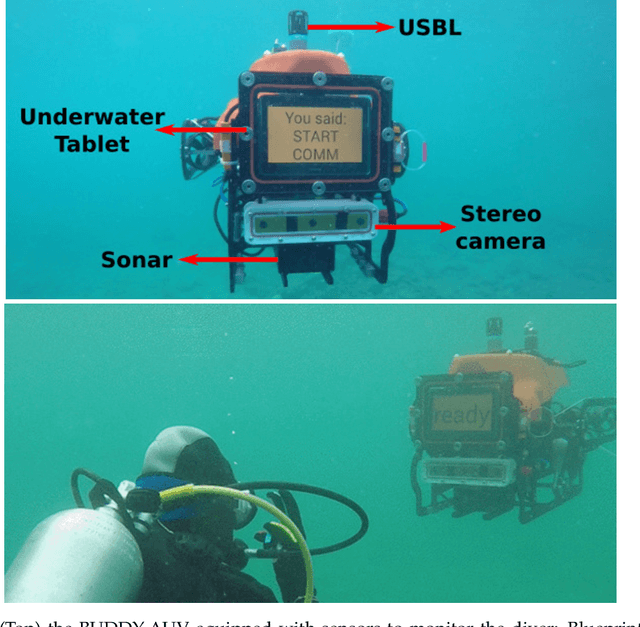
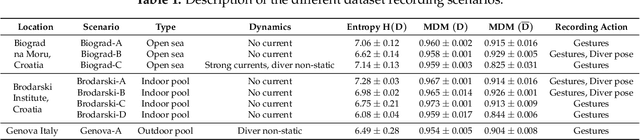
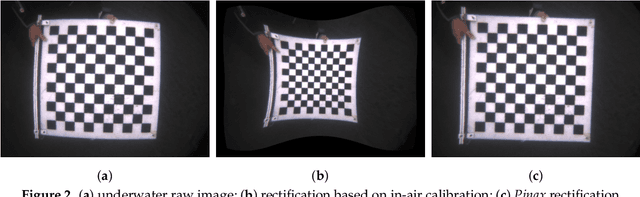
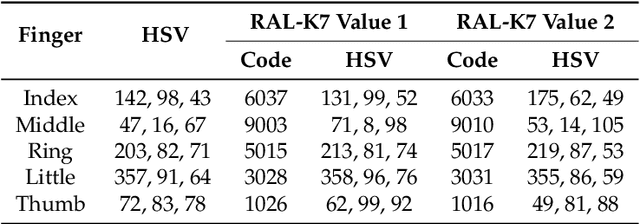
In this article we present a novel underwater dataset collected from several field trials within the EU FP7 project "Cognitive autonomous diving buddy (CADDY)", where an Autonomous Underwater Vehicle (AUV) was used to interact with divers and monitor their activities. To our knowledge, this is one of the first efforts to collect a large dataset in underwater environments targeting object classification, segmentation and human pose estimation tasks. The first part of the dataset contains stereo camera recordings (~10K) of divers performing hand gestures to communicate and interact with an AUV in different environmental conditions. These gestures samples serve to test the robustness of object detection and classification algorithms against underwater image distortions i.e., color attenuation and light backscatter. The second part includes stereo footage (~12.7K) of divers free-swimming in front of the AUV, along with synchronized IMUs measurements located throughout the diver's suit (DiverNet) which serve as ground-truth for human pose and tracking methods. In both cases, these rectified images allow investigation of 3D representation and reasoning pipelines from low-texture targets commonly present in underwater scenarios. In this paper we describe our recording platform, sensor calibration procedure plus the data format and the utilities provided to use the dataset.