 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNemotron 3 Ultra: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Jun 12, 2026We introduce Nemotron 3 Ultra, a 550 billion total and 55 billion active parameter Mixture-of-Experts Hybrid Mamba-Attention language model. We pre-trained Nemotron 3 Ultra on 20 trillion text tokens, then extended the context length to 1M tokens, and post-trained using Supervised Fine Tuning (SFT), Reinforcement Learning (RL), and Multi-teacher On-Policy Distillation (MOPD). Nemotron 3 Ultra is our most capable model yet, employing multiple key technologies - LatentMoE, Multi Token Prediction (MTP), NVFP4 pre-training, multi-environment RLVR, MOPD, and reasoning budget control. Nemotron 3 Ultra achieves up to ~6x higher inference throughput as compared to state-of-the-art publicly available LLMs while attaining on-par accuracy. The state-of-the-art accuracy, high inference throughput, and 1M token context length make Nemotron 3 Ultra ideal for long-running autonomous agentic tasks. We open-source the base, post-trained, and quantized checkpoints, along with the training data and recipe on HuggingFace.
Nemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
Retrieve to Explain: Evidence-driven Predictions with Language Models
Feb 06, 2024



Machine learning models, particularly language models, are notoriously difficult to introspect. Black-box models can mask both issues in model training and harmful biases. For human-in-the-loop processes, opaque predictions can drive lack of trust, limiting a model's impact even when it performs effectively. To address these issues, we introduce Retrieve to Explain (R2E). R2E is a retrieval-based language model that prioritizes amongst a pre-defined set of possible answers to a research question based on the evidence in a document corpus, using Shapley values to identify the relative importance of pieces of evidence to the final prediction. R2E can adapt to new evidence without retraining, and incorporate structured data through templating into natural language. We assess on the use case of drug target identification from published scientific literature, where we show that the model outperforms an industry-standard genetics-based approach on predicting clinical trial outcomes.
Working memory facilitates reward-modulated Hebbian learning in recurrent neural networks
Oct 23, 2019
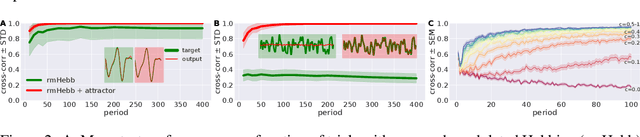
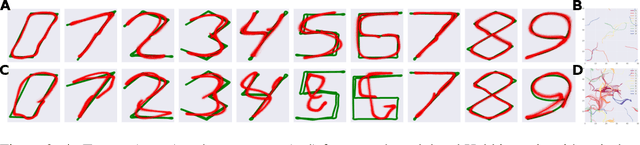
Reservoir computing is a powerful tool to explain how the brain learns temporal sequences, such as movements, but existing learning schemes are either biologically implausible or too inefficient to explain animal performance. We show that a network can learn complicated sequences with a reward-modulated Hebbian learning rule if the network of reservoir neurons is combined with a second network that serves as a dynamic working memory and provides a spatio-temporal backbone signal to the reservoir. In combination with the working memory, reward-modulated Hebbian learning of the readout neurons performs as well as FORCE learning, but with the advantage of a biologically plausible interpretation of both the learning rule and the learning paradigm.
Efficient Model-Based Deep Reinforcement Learning with Variational State Tabulation
Jun 11, 2018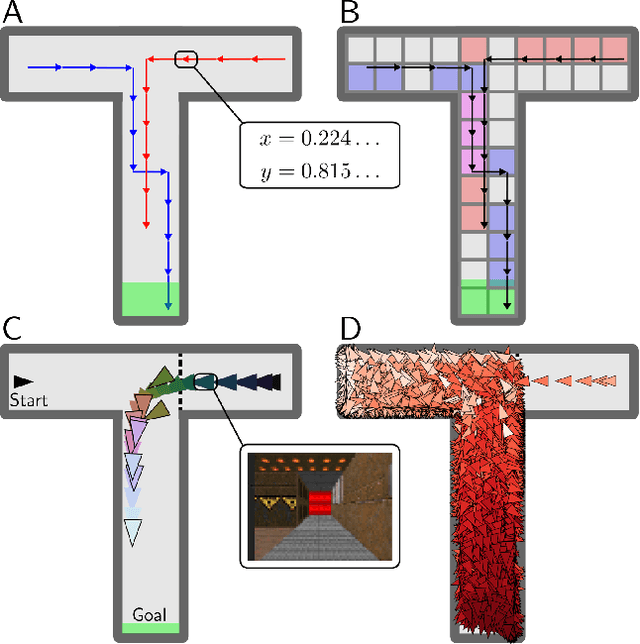
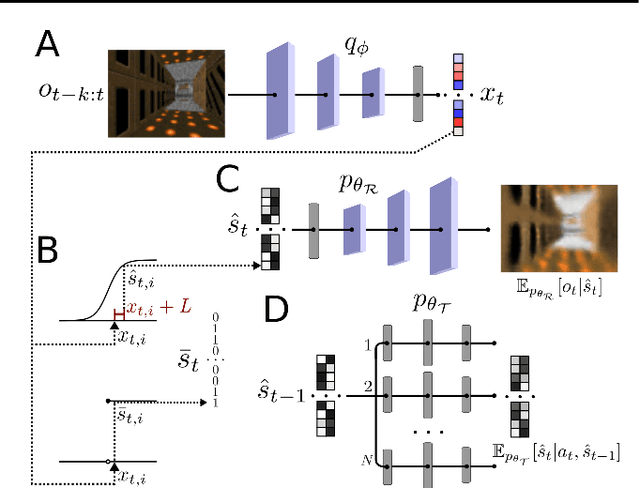
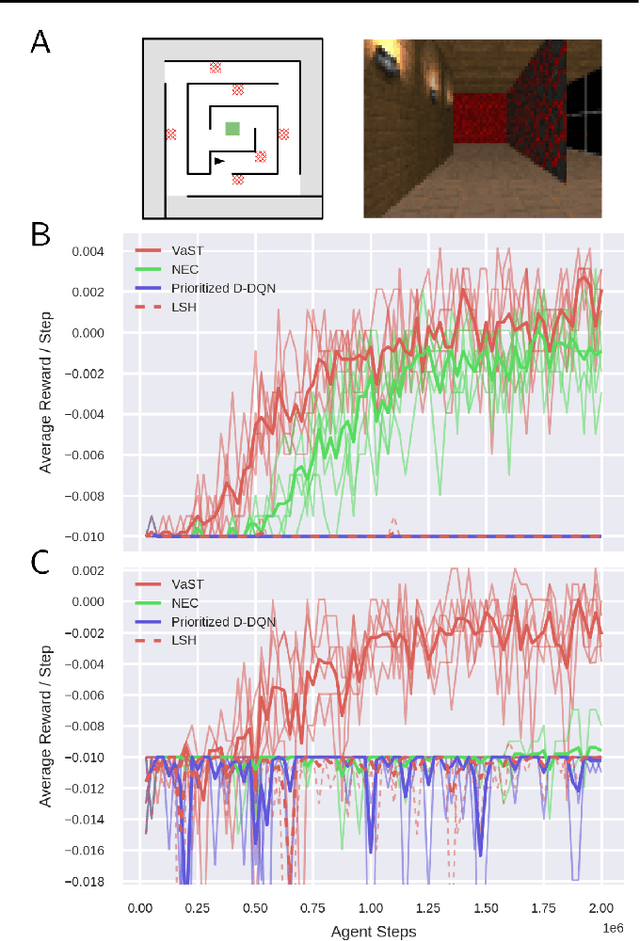
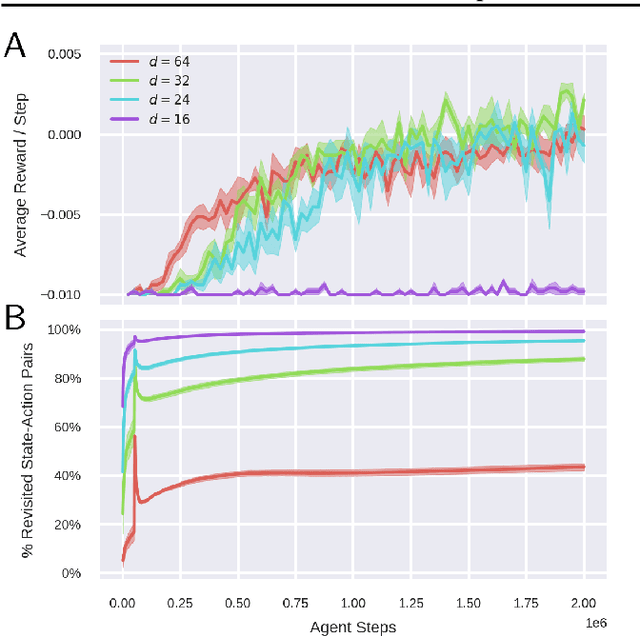
Modern reinforcement learning algorithms reach super-human performance on many board and video games, but they are sample inefficient, i.e. they typically require significantly more playing experience than humans to reach an equal performance level. To improve sample efficiency, an agent may build a model of the environment and use planning methods to update its policy. In this article we introduce Variational State Tabulation (VaST), which maps an environment with a high-dimensional state space (e.g. the space of visual inputs) to an abstract tabular model. Prioritized sweeping with small backups, a highly efficient planning method, can then be used to update state-action values. We show how VaST can rapidly learn to maximize reward in tasks like 3D navigation and efficiently adapt to sudden changes in rewards or transition probabilities.