 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Vehicles Trajectories in Urban Scenarios with Transformer Networks and Augmented Information
Jun 07, 2021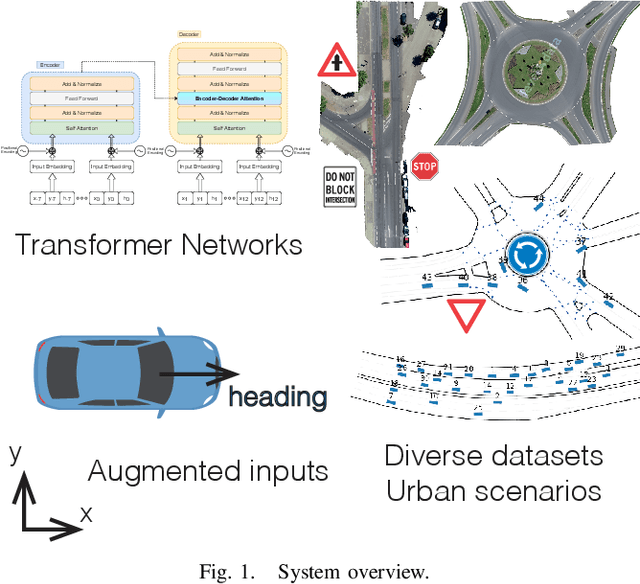
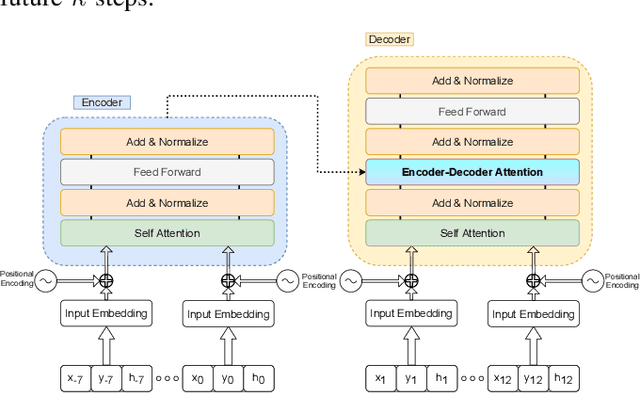
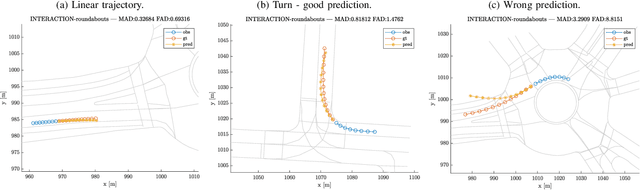
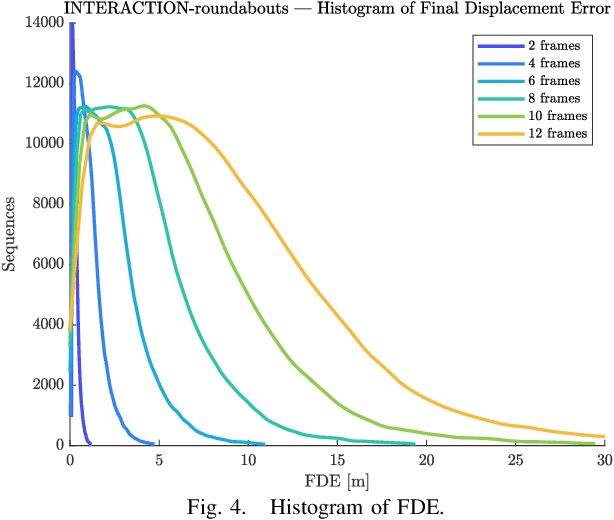
Understanding the behavior of road users is of vital importance for the development of trajectory prediction systems. In this context, the latest advances have focused on recurrent structures, establishing the social interaction between the agents involved in the scene. More recently, simpler structures have also been introduced for predicting pedestrian trajectories, based on Transformer Networks, and using positional information. They allow the individual modelling of each agent's trajectory separately without any complex interaction terms. Our model exploits these simple structures by adding augmented data (position and heading), and adapting their use to the problem of vehicle trajectory prediction in urban scenarios in prediction horizons up to 5 seconds. In addition, a cross-performance analysis is performed between different types of scenarios, including highways, intersections and roundabouts, using recent datasets (inD, rounD, highD and INTERACTION). Our model achieves state-of-the-art results and proves to be flexible and adaptable to different types of urban contexts.
The PREVENTION Challenge: How Good Are Humans Predicting Lane Changes?
Sep 11, 2020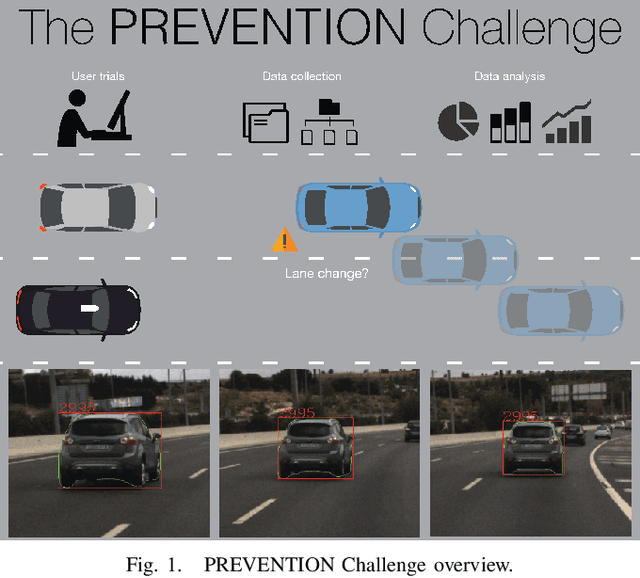
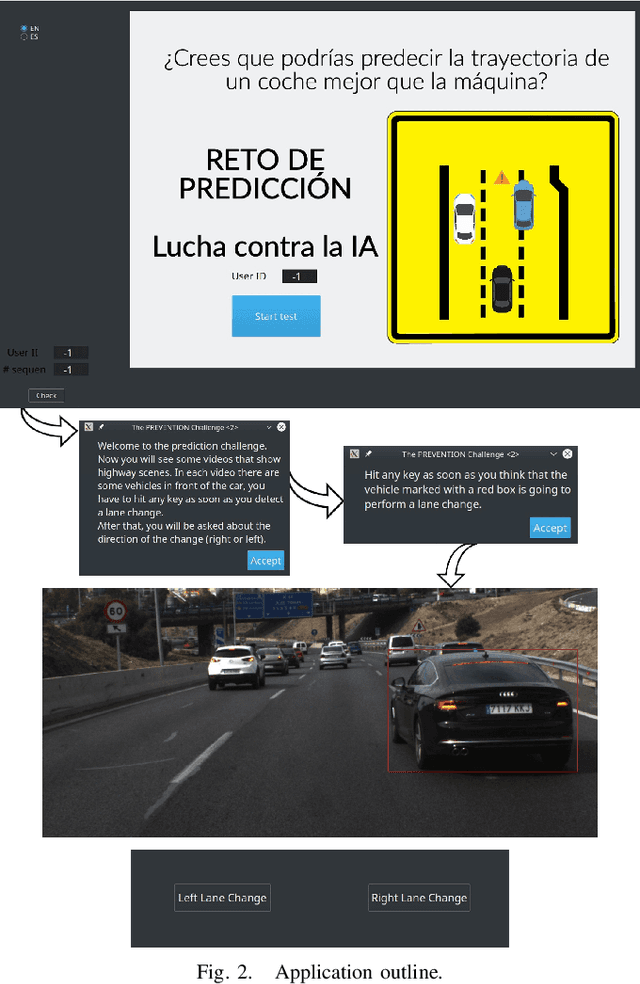
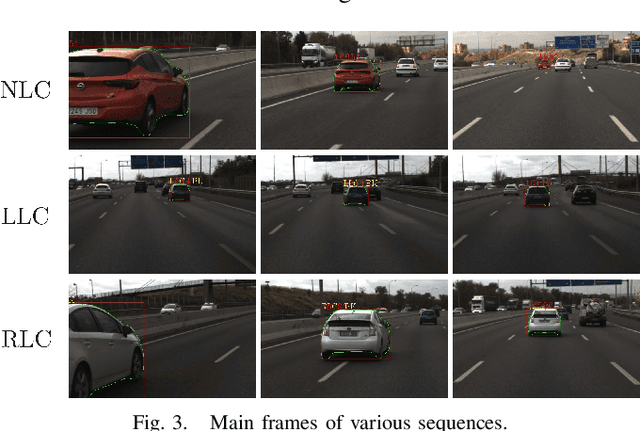
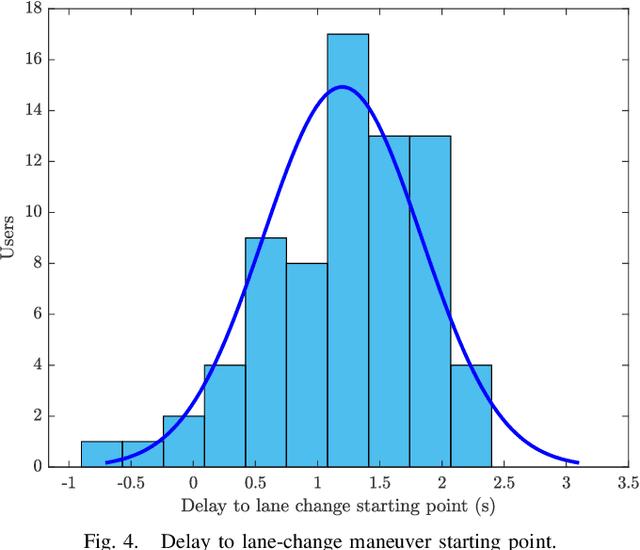
While driving on highways, every driver tries to be aware of the behavior of surrounding vehicles, including possible emergency braking, evasive maneuvers trying to avoid obstacles, unexpected lane changes, or other emergencies that could lead to an accident. In this paper, human's ability to predict lane changes in highway scenarios is analyzed through the use of video sequences extracted from the PREVENTION dataset, a database focused on the development of research on vehicle intention and trajectory prediction. Thus, users had to indicate the moment at which they considered that a lane change maneuver was taking place in a target vehicle, subsequently indicating its direction: left or right. The results retrieved have been carefully analyzed and compared to ground truth labels, evaluating statistical models to understand whether humans can actually predict. The study has revealed that most participants are unable to anticipate lane-change maneuvers, detecting them after they have started. These results might serve as a baseline for AI's prediction ability evaluation, grading if those systems can outperform human skills by analyzing hidden cues that seem unnoticed, improving the detection time, and even anticipating maneuvers in some cases.