 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Multi-robot Motion Planning via Hierarchical Subproblem Expansion and Workspace Decomposition Refinement
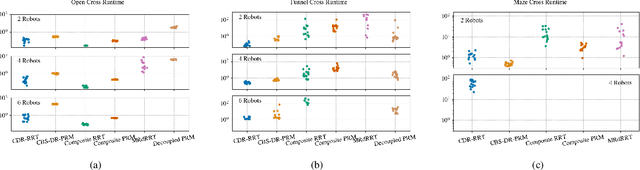
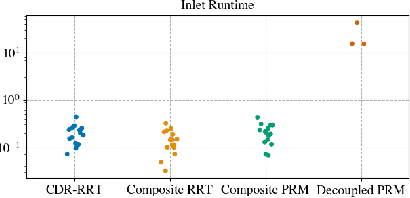
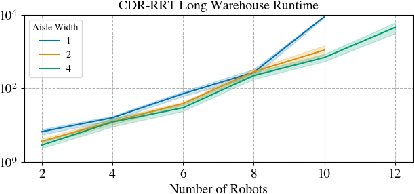
May 19, 2026A fundamental challenge in multi-robot motion planning is achieving sufficient coordination to avoid inter-robot conflicts without incurring the large computational expense of searching the joint configuration space of the robot group. In this work, we present a method for multiple mobile robot motion planning that achieves an improvement in planning time up to an order of magnitude by leveraging the insight that we can use discrete search over a workspace decomposition to provide coordination between robots during planning. While prior work uses workspace topology to inform when coordination between robots is needed and then composes robots into their joint configuration space, we take a step further by iteratively refining our workspace representation to allow our planner to search smaller, decoupled configuration spaces.
A Framework for Guided Motion Planning
Apr 04, 2024Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants bias their sampling using various heuristics related to the known underlying structure of the search space. In this work, we formalize the intuitive notion of guided search by defining the concept of a guiding space. This new language encapsulates many seemingly distinct prior methods under the same framework, and allows us to reason about guidance, a previously obscured core contribution of different algorithms. We suggest an information theoretic method to evaluate guidance, which experimentally matches intuition when tested on known algorithms in a variety of environments. The language and evaluation of guidance suggests improvements to existing methods, and allows for simple hybrid algorithms that combine guidance from multiple sources.
Hypergraph-based Multi-robot Motion Planning with Topological Guidance
Nov 16, 2023



We present a multi-robot motion planning algorithm that efficiently finds paths for robot teams up to ten times larger than existing methods in congested settings with narrow passages in the environment. Narrow passages represent a source of difficulty for sampling-based motion planning algorithms. This problem is exacerbated for multi-robot systems where the planner must also avoid inter-robot collisions within these congested spaces, requiring coordination. Topological guidance, which leverages information about the robot's environment, has been shown to improve performance for mobile robot motion planning in single robot scenarios with narrow passages. Additionally, our prior work has explored using topological guidance in multi-robot settings where a high degree of coordination is required of the full robot group. This high level of coordination, however, is not always necessary and results in excessive computational overhead for large groups. Here, we propose a novel multi-robot motion planning method that leverages topological guidance to inform the planner when coordination between robots is necessary, leading to a significant improvement in scalability.
Evaluating Guiding Spaces for Motion Planning
Oct 16, 2022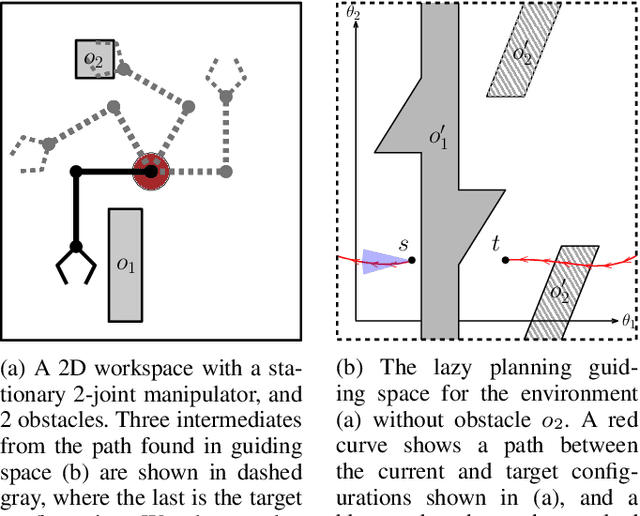
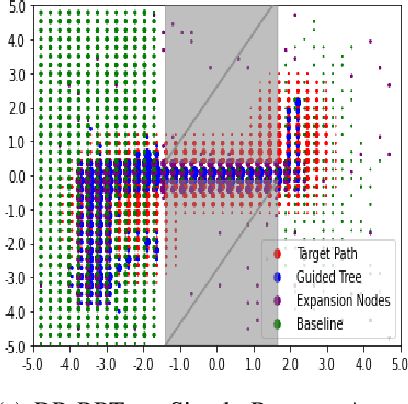
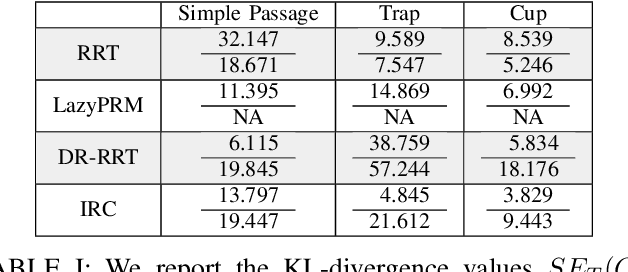
Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants do not sample uniformly at random, and instead bias their sampling using various heuristics for determining which samples will provide more information, or are more likely to participate in the final solution. In this work, we define the \emph{motion planning guiding space}, which encapsulates many seemingly distinct prior works under the same framework. In addition, we suggest an information theoretic method to evaluate guided planning which places the focus on the quality of the resulting biased sampling. Finally, we analyze several motion planning algorithms in order to demonstrate the applicability of our definition and its evaluation.
Scalable Multi-robot Motion Planning for Congested Environments Using Topological Guidance
Oct 13, 2022
Multi-robot motion planning (MRMP) is the problem of finding collision-free paths for a set of robots in a continuous state space. The difficulty of MRMP increases with the number of robots due to the increased potential for collisions between robots. This problem is exacerbated in environments with narrow passages that robots must pass through, like warehouses. In single-robot settings, topology-guided motion planning methods have shown increased performance in these constricted environments. We adapt an existing topology-guided single-robot motion planning method to the multi-robot domain, introducing topological guidance for the composite space. We demonstrate our method's ability to efficiently plan paths in complex environments with many narrow passages, scaling to robot teams of size up to five times larger than existing methods in this class of problems. By leveraging knowledge of the topology of the environment, we also find higher quality solutions than other methods.