 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOcclusion-Aware Ground Target Search by a UAV in an Urban Environment
Nov 11, 2025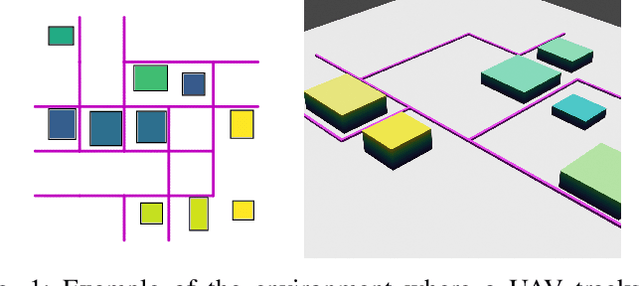
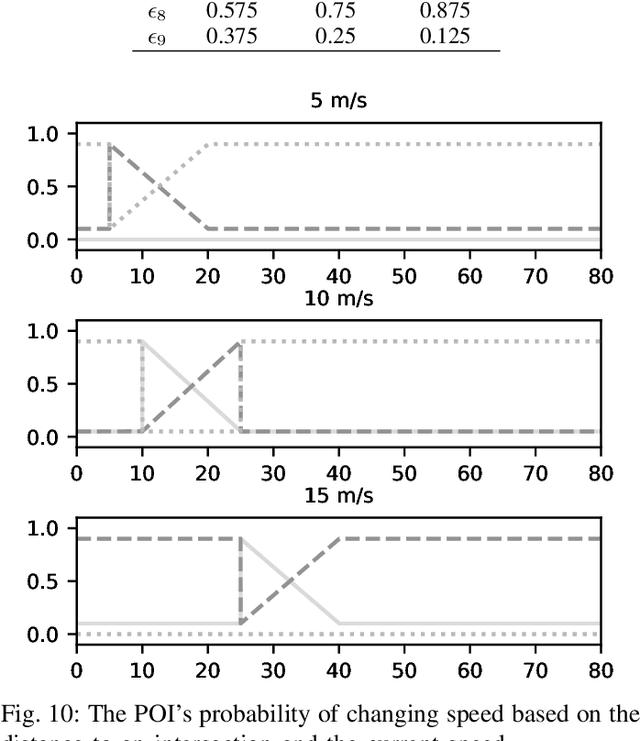
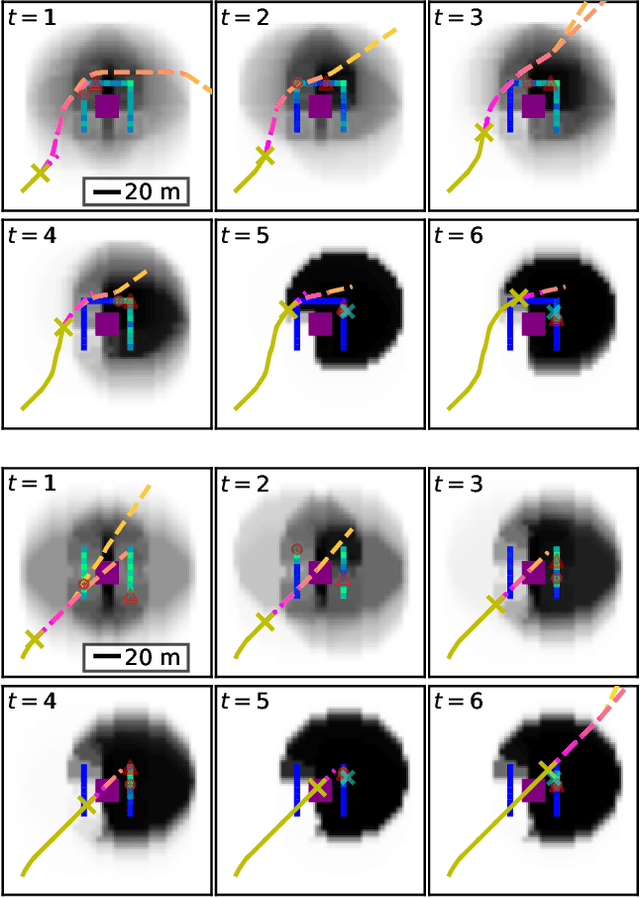
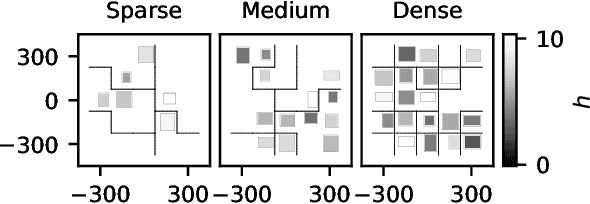
This paper considers the problem of searching for a point of interest (POI) moving along an urban road network with an uncrewed aerial vehicle (UAV). The UAV is modeled as a variable-speed Dubins vehicle with a line-of-sight sensor in an urban environment that may occlude the sensor's view of the POI. A search strategy is proposed that exploits a probabilistic visibility volume (VV) to plan its future motion with iterative deepening $A^\ast$. The probabilistic VV is a time-varying three-dimensional representation of the sensing constraints for a particular distribution of the POI's state. To find the path most likely to view the POI, the planner uses a heuristic to optimistically estimate the probability of viewing the POI over a time horizon. The probabilistic VV is max-pooled to create a variable-timestep planner that reduces the search space and balances long-term and short-term planning. The proposed path planning method is compared to prior work with a Monte-Carlo simulation and is shown to outperform the baseline methods in cluttered environments when the UAV's sensor has a higher false alarm probability.
Design and Flight Demonstration of a Quadrotor for Urban Mapping and Target Tracking Research
Feb 20, 2024



This paper describes the hardware design and flight demonstration of a small quadrotor with imaging sensors for urban mapping, hazard avoidance, and target tracking research. The vehicle is equipped with five cameras, including two pairs of fisheye stereo cameras that enable a nearly omnidirectional view and a two-axis gimbaled camera. An onboard NVIDIA Jetson Orin Nano computer running the Robot Operating System software is used for data collection. An autonomous tracking behavior was implemented to coordinate the motion of the quadrotor and gimbaled camera to track a moving GPS coordinate. The data collection system was demonstrated through a flight test that tracked a moving GPS-tagged vehicle through a series of roads and parking lots. A map of the environment was reconstructed from the collected images using the Direct Sparse Odometry (DSO) algorithm. The performance of the quadrotor was also characterized by acoustic noise, communication range, battery voltage in hover, and maximum speed tests.
GPU-Accelerated 3D Polygon Visibility Volumes for Synergistic Perception and Navigation
Feb 05, 2024



UAV missions often require specific geometric constraints to be satisfied between ground locations and the vehicle location. Such requirements are typical for contexts where line-of-sight must be maintained between the vehicle location and the ground control location and are also important in surveillance applications where the UAV wishes to be able to sense, e.g., with a camera sensor, a specific region within a complex geometric environment. This problem is further complicated when the ground location is generalized to a convex 2D polygonal region. This article describes the theory and implementation of a system which can quickly calculate the 3D volume that encloses all 3D coordinates from which a 2D convex planar region can be entirely viewed; referred to as a visibility volume. The proposed approach computes visibility volumes using a combination of depth map computation using GPU-acceleration and geometric boolean operations. Solutions to this problem require complex 3D geometric analysis techniques that must execute using arbitrary precision arithmetic on a collection of discontinuous and non-analytic surfaces. Post-processing steps incorporate navigational constraints to further restrict the enclosed coordinates to include both visibility and navigation constraints. Integration of sensing visibility constraints with navigational constraints yields a range of navigable space where a vehicle will satisfy both perceptual sensing and navigational needs of the mission. This algorithm then provides a synergistic perception and navigation sensitive solution yielding a volume of coordinates in 3D that satisfy both the mission path and sensing needs.
Cesium Tiles for High-realism Simulation and Comparing SLAM Results in Corresponding Virtual and Real-world Environments
Jan 15, 2024This article discusses the use of a simulated environment to predict algorithm results in the real world. Simulators are crucial in allowing researchers to test algorithms, sensor integration, and navigation systems without deploying expensive hardware. This article examines how the AirSim simulator, Unreal Engine, and Cesium plugin can be used to generate simulated digital twin models of real-world locations. Several technical challenges in completing the analysis are discussed and the technical solutions are detailed in this article. Work investigates how to assess mapping results for a real-life experiment using Cesium Tiles provided by digital twins of the experimental location. This is accompanied by a description of a process for duplicating real-world flights in simulation. The performance of these methods is evaluated by analyzing real-life and experimental image telemetry with the Direct Sparse Odometry (DSO) mapping algorithm. Results indicate that Cesium Tiles environments can provide highly accurate models of ground truth geometry after careful alignment. Further, results from real-life and simulated telemetry analysis indicate that the virtual simulation results accurately predict real-life results. Findings indicate that the algorithm results in real life and in the simulated duplicate exhibited a high degree of similarity. This indicates that the use of Cesium Tiles environments as a virtual digital twin for real-life experiments will provide representative results for such algorithms. The impact of this can be significant, potentially allowing expansive virtual testing of robotic systems at specific deployment locations to develop solutions that are tailored to the environment and potentially outperforming solutions meant to work in completely generic environments.
Planning Visual Inspection Tours for a 3D Dubins Airplane Model in an Urban Environment
Jan 12, 2023This paper investigates the problem of planning a minimum-length tour for a three-dimensional Dubins airplane model to visually inspect a series of targets located on the ground or exterior surface of objects in an urban environment. Objects are 2.5D extruded polygons representing buildings or other structures. A visibility volume defines the set of admissible (occlusion-free) viewing locations for each target that satisfy feasible airspace and imaging constraints. The Dubins traveling salesperson problem with neighborhoods (DTSPN) is extended to three dimensions with visibility volumes that are approximated by triangular meshes. Four sampling algorithms are proposed for sampling vehicle configurations within each visibility volume to define vertices of the underlying DTSPN. Additionally, a heuristic approach is proposed to improve computation time by approximating edge costs of the 3D Dubins airplane with a lower bound that is used to solve for a sequence of viewing locations. The viewing locations are then assigned pitch and heading angles based on their relative geometry. The proposed sampling methods and heuristics are compared through a Monte-Carlo experiment that simulates view planning tours over a realistic urban environment.
* 18 pages, 10 figures, Presented at 2023 SciTech Intelligent Systems in Guidance Navigation and Control conference