 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing MARL for Energy Control: A Multi-KPI Benchmark on the CityLearn Environment
Feb 22, 2026The optimization of urban energy systems is crucial for the advancement of sustainable and resilient smart cities, which are becoming increasingly complex with multiple decision-making units. To address scalability and coordination concerns, Multi-Agent Reinforcement Learning (MARL) is a promising solution. This paper addresses the imperative need for comprehensive and reliable benchmarking of MARL algorithms on energy management tasks. CityLearn is used as a case study environment because it realistically simulates urban energy systems, incorporates multiple storage systems, and utilizes renewable energy sources. By doing so, our work sets a new standard for evaluation, conducting a comparative study across multiple key performance indicators (KPIs). This approach illuminates the key strengths and weaknesses of various algorithms, moving beyond traditional KPI averaging which often masks critical insights. Our experiments utilize widely accepted baselines such as Proximal Policy Optimization (PPO) and Soft Actor Critic (SAC), and encompass diverse training schemes including Decentralized Training with Decentralized Execution (DTDE) and Centralized Training with Decentralized Execution (CTDE) approaches and different neural network architectures. Our work also proposes novel KPIs that tackle real world implementation challenges such as individual building contribution and battery storage lifetime. Our findings show that DTDE consistently outperforms CTDE in both average and worst-case performance. Additionally, temporal dependency learning improved control on memory dependent KPIs such as ramping and battery usage, contributing to more sustainable battery operation. Results also reveal robustness to agent or resource removal, highlighting both the resilience and decentralizability of the learned policies.
Oryx: a Performant and Scalable Algorithm for Many-Agent Coordination in Offline MARL
May 28, 2025



A key challenge in offline multi-agent reinforcement learning (MARL) is achieving effective many-agent multi-step coordination in complex environments. In this work, we propose Oryx, a novel algorithm for offline cooperative MARL to directly address this challenge. Oryx adapts the recently proposed retention-based architecture Sable and combines it with a sequential form of implicit constraint Q-learning (ICQ), to develop a novel offline auto-regressive policy update scheme. This allows Oryx to solve complex coordination challenges while maintaining temporal coherence over lengthy trajectories. We evaluate Oryx across a diverse set of benchmarks from prior works (SMAC, RWARE, and Multi-Agent MuJoCo) covering tasks of both discrete and continuous control, varying in scale and difficulty. Oryx achieves state-of-the-art performance on more than 80% of the 65 tested datasets, outperforming prior offline MARL methods and demonstrating robust generalisation across domains with many agents and long horizons. Finally, we introduce new datasets to push the limits of many-agent coordination in offline MARL, and demonstrate Oryx's superior ability to scale effectively in such settings. We will make all of our datasets, experimental data, and code available upon publication.
Breaking the Performance Ceiling in Complex Reinforcement Learning requires Inference Strategies
May 27, 2025



Reinforcement learning (RL) systems have countless applications, from energy-grid management to protein design. However, such real-world scenarios are often extremely difficult, combinatorial in nature, and require complex coordination between multiple agents. This level of complexity can cause even state-of-the-art RL systems, trained until convergence, to hit a performance ceiling which they are unable to break out of with zero-shot inference. Meanwhile, many digital or simulation-based applications allow for an inference phase that utilises a specific time and compute budget to explore multiple attempts before outputting a final solution. In this work, we show that such an inference phase employed at execution time, and the choice of a corresponding inference strategy, are key to breaking the performance ceiling observed in complex multi-agent RL problems. Our main result is striking: we can obtain up to a 126% and, on average, a 45% improvement over the previous state-of-the-art across 17 tasks, using only a couple seconds of extra wall-clock time during execution. We also demonstrate promising compute scaling properties, supported by over 60k experiments, making it the largest study on inference strategies for complex RL to date. Our experimental data and code are available at https://sites.google.com/view/inf-marl.
Performant, Memory Efficient and Scalable Multi-Agent Reinforcement Learning
Oct 02, 2024



As the field of multi-agent reinforcement learning (MARL) progresses towards larger and more complex environments, achieving strong performance while maintaining memory efficiency and scalability to many agents becomes increasingly important. Although recent research has led to several advanced algorithms, to date, none fully address all of these key properties simultaneously. In this work, we introduce Sable, a novel and theoretically sound algorithm that adapts the retention mechanism from Retentive Networks to MARL. Sable's retention-based sequence modelling architecture allows for computationally efficient scaling to a large number of agents, as well as maintaining a long temporal context, making it well-suited for large-scale partially observable environments. Through extensive evaluations across six diverse environments, we demonstrate how Sable is able to significantly outperform existing state-of-the-art methods in the majority of tasks (34 out of 45, roughly 75\%). Furthermore, Sable demonstrates stable performance as we scale the number of agents, handling environments with more than a thousand agents while exhibiting a linear increase in memory usage. Finally, we conduct ablation studies to isolate the source of Sable's performance gains and confirm its efficient computational memory usage. Our results highlight Sable's performance and efficiency, positioning it as a leading approach to MARL at scale.
Putting Data at the Centre of Offline Multi-Agent Reinforcement Learning
Sep 18, 2024



Offline multi-agent reinforcement learning (MARL) is an exciting direction of research that uses static datasets to find optimal control policies for multi-agent systems. Though the field is by definition data-driven, efforts have thus far neglected data in their drive to achieve state-of-the-art results. We first substantiate this claim by surveying the literature, showing how the majority of works generate their own datasets without consistent methodology and provide sparse information about the characteristics of these datasets. We then show why neglecting the nature of the data is problematic, through salient examples of how tightly algorithmic performance is coupled to the dataset used, necessitating a common foundation for experiments in the field. In response, we take a big step towards improving data usage and data awareness in offline MARL, with three key contributions: (1) a clear guideline for generating novel datasets; (2) a standardisation of over 80 existing datasets, hosted in a publicly available repository, using a consistent storage format and easy-to-use API; and (3) a suite of analysis tools that allow us to understand these datasets better, aiding further development.
Coordination Failure in Cooperative Offline MARL
Jul 01, 2024



Offline multi-agent reinforcement learning (MARL) leverages static datasets of experience to learn optimal multi-agent control. However, learning from static data presents several unique challenges to overcome. In this paper, we focus on coordination failure and investigate the role of joint actions in multi-agent policy gradients with offline data, focusing on a common setting we refer to as the 'Best Response Under Data' (BRUD) approach. By using two-player polynomial games as an analytical tool, we demonstrate a simple yet overlooked failure mode of BRUD-based algorithms, which can lead to catastrophic coordination failure in the offline setting. Building on these insights, we propose an approach to mitigate such failure, by prioritising samples from the dataset based on joint-action similarity during policy learning and demonstrate its effectiveness in detailed experiments. More generally, however, we argue that prioritised dataset sampling is a promising area for innovation in offline MARL that can be combined with other effective approaches such as critic and policy regularisation. Importantly, our work shows how insights drawn from simplified, tractable games can lead to useful, theoretically grounded insights that transfer to more complex contexts. A core dimension of offering is an interactive notebook, from which almost all of our results can be reproduced, in a browser.
Dispelling the Mirage of Progress in Offline MARL through Standardised Baselines and Evaluation
Jun 13, 2024



Offline multi-agent reinforcement learning (MARL) is an emerging field with great promise for real-world applications. Unfortunately, the current state of research in offline MARL is plagued by inconsistencies in baselines and evaluation protocols, which ultimately makes it difficult to accurately assess progress, trust newly proposed innovations, and allow researchers to easily build upon prior work. In this paper, we firstly identify significant shortcomings in existing methodologies for measuring the performance of novel algorithms through a representative study of published offline MARL work. Secondly, by directly comparing to this prior work, we demonstrate that simple, well-implemented baselines can achieve state-of-the-art (SOTA) results across a wide range of tasks. Specifically, we show that on 35 out of 47 datasets used in prior work (almost 75% of cases), we match or surpass the performance of the current purported SOTA. Strikingly, our baselines often substantially outperform these more sophisticated algorithms. Finally, we correct for the shortcomings highlighted from this prior work by introducing a straightforward standardised methodology for evaluation and by providing our baseline implementations with statistically robust results across several scenarios, useful for comparisons in future work. Our proposal includes simple and sensible steps that are easy to adopt, which in combination with solid baselines and comparative results, could substantially improve the overall rigour of empirical science in offline MARL moving forward.
Reduce, Reuse, Recycle: Selective Reincarnation in Multi-Agent Reinforcement Learning
Mar 31, 2023'Reincarnation' in reinforcement learning has been proposed as a formalisation of reusing prior computation from past experiments when training an agent in an environment. In this paper, we present a brief foray into the paradigm of reincarnation in the multi-agent (MA) context. We consider the case where only some agents are reincarnated, whereas the others are trained from scratch -- selective reincarnation. In the fully-cooperative MA setting with heterogeneous agents, we demonstrate that selective reincarnation can lead to higher returns than training fully from scratch, and faster convergence than training with full reincarnation. However, the choice of which agents to reincarnate in a heterogeneous system is vitally important to the outcome of the training -- in fact, a poor choice can lead to considerably worse results than the alternatives. We argue that a rich field of work exists here, and we hope that our effort catalyses further energy in bringing the topic of reincarnation to the multi-agent realm.
Off-the-Grid MARL: a Framework for Dataset Generation with Baselines for Cooperative Offline Multi-Agent Reinforcement Learning
Feb 01, 2023



Being able to harness the power of large, static datasets for developing autonomous multi-agent systems could unlock enormous value for real-world applications. Many important industrial systems are multi-agent in nature and are difficult to model using bespoke simulators. However, in industry, distributed system processes can often be recorded during operation, and large quantities of demonstrative data can be stored. Offline multi-agent reinforcement learning (MARL) provides a promising paradigm for building effective online controllers from static datasets. However, offline MARL is still in its infancy, and, therefore, lacks standardised benchmarks, baselines and evaluation protocols typically found in more mature subfields of RL. This deficiency makes it difficult for the community to sensibly measure progress. In this work, we aim to fill this gap by releasing \emph{off-the-grid MARL (OG-MARL)}: a framework for generating offline MARL datasets and algorithms. We release an initial set of datasets and baselines for cooperative offline MARL, created using the framework, along with a standardised evaluation protocol. Our datasets provide settings that are characteristic of real-world systems, including complex dynamics, non-stationarity, partial observability, suboptimality and sparse rewards, and are generated from popular online MARL benchmarks. We hope that OG-MARL will serve the community and help steer progress in offline MARL, while also providing an easy entry point for researchers new to the field.
Mava: a research framework for distributed multi-agent reinforcement learning
Jul 03, 2021
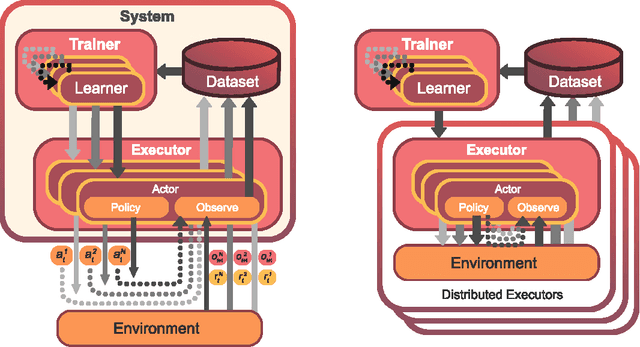
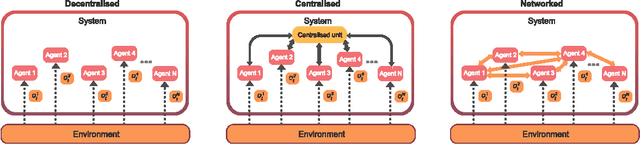
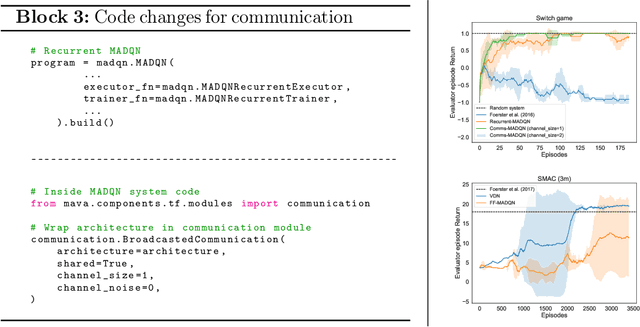
Breakthrough advances in reinforcement learning (RL) research have led to a surge in the development and application of RL. To support the field and its rapid growth, several frameworks have emerged that aim to help the community more easily build effective and scalable agents. However, very few of these frameworks exclusively support multi-agent RL (MARL), an increasingly active field in itself, concerned with decentralised decision-making problems. In this work, we attempt to fill this gap by presenting Mava: a research framework specifically designed for building scalable MARL systems. Mava provides useful components, abstractions, utilities and tools for MARL and allows for simple scaling for multi-process system training and execution, while providing a high level of flexibility and composability. Mava is built on top of DeepMind's Acme \citep{hoffman2020acme}, and therefore integrates with, and greatly benefits from, a wide range of already existing single-agent RL components made available in Acme. Several MARL baseline systems have already been implemented in Mava. These implementations serve as examples showcasing Mava's reusable features, such as interchangeable system architectures, communication and mixing modules. Furthermore, these implementations allow existing MARL algorithms to be easily reproduced and extended. We provide experimental results for these implementations on a wide range of multi-agent environments and highlight the benefits of distributed system training.