 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel RF-enabled Non-Destructive Inspection Method through Machine Learning and Programmable Wireless Environments
Jan 10, 2026Contemporary industrial Non-Destructive Inspection (NDI) methods require sensing capabilities that operate in occluded, hazardous, or access restricted environments. Yet, the current visual inspection based on optical cameras offers limited quality of service to that respect. In that sense, novel methods for workpiece inspection, suitable, for smart manufacturing are needed. Programmable Wireless Environments (PWE) could help towards that direction, by redefining the wireless Radio Frequency (RF) wave propagation as a controllable inspector entity. In this work, we propose a novel approach to Non-Destructive Inspection, leveraging an RF sensing pipeline based on RF wavefront encoding for retrieving workpiece-image entries from a designated database. This approach combines PWE-enabled RF wave manipulation with machine learning (ML) tools trained to produce visual outputs for quality inspection. Specifically, we establish correlation relationships between RF wavefronts and target industrial assets, hence yielding a dataset which links wavefronts to their corresponding images in a structured manner. Subsequently, a Generative Adversarial Network (GAN) derives visual representations closely matching the database entries. Our results indicate that the proposed method achieves an SSIM 99.5% matching score in visual outputs, paving the way for next-generation quality control workflows in industry.
How Many Pinching Antennas Are Enough?
Dec 21, 2025



Programmable wireless environments (PWEs) have emerged as a key paradigm for next-generation communication networks, aiming to transform wireless propagation from an uncontrollable phenomenon into a reconfigurable process that can adapt to diverse service requirements. In this framework, pinching-antenna systems (PASs) have recently been proposed as a promising enabling technology, as they allow the radiation location and effective propagation distance to be adjusted by selectively exciting radiating points along a dielectric waveguide. However, most existing studies on PASs rely on the idealized assumption that pinching-antenna (PA) positions can be continuously adjusted along the waveguide, while realistically only a finite set of pinching locations is available. Motivated by this, this paper analyzes the performance of two-state PASs, where the PA positions are fixed and only their activation state can be controlled. By explicitly accounting for the spatial discreteness of the available pinching points, closed-form analytical expressions for the outage probability and the ergodic achievable data rate are derived. In addition, we introduce the pinching discretization efficiency to quantify the performance gap between discrete and continuous pinching configurations, enabling a direct assessment of the number of PAs required to approximate the ideal continuous case. Finally, numerical results validate the analytical framework and show that near-continuous performance can be achieved with a limited number of PAs, offering useful insights for the design and deployment of PASs in PWEs.
Energy-aware Trajectory Optimization for UAV-mounted RIS and Full-duplex Relay
Jan 22, 2024In the evolving landscape of sixth-generation (6G) wireless networks, unmanned aerial vehicles (UAVs) have emerged as transformative tools for dynamic and adaptive connectivity. However, dynamically adjusting their position to offer favorable communication channels introduces operational challenges in terms of energy consumption, especially when integrating advanced communication technologies like reconfigurable intelligent surfaces (RISs) and full-duplex relays (FDRs). To this end, by recognizing the pivotal role of UAV mobility, the paper introduces an energy-aware trajectory design for UAV-mounted RISs and UAV-mounted FDRs using the decode and forward (DF) protocol, aiming to maximize the network minimum rate and enhance user fairness, while taking into consideration the available on-board energy. Specifically, this work highlights their distinct energy consumption characteristics and their associated integration challenges by developing appropriate energy consumption models for both UAV-mounted RISs and FDRs that capture the intricate relationship between key factors such as weight, and their operational characteristics. Furthermore, a joint time-division multiple access (TDMA) user scheduling-UAV trajectory optimization problem is formulated, considering the power dynamics of both systems, while assuring that the UAV energy is not depleted mid-air. Finally, simulation results underscore the importance of energy considerations in determining the optimal trajectory and scheduling and provide insights into the performance comparison of UAV-mounted RISs and FDRs in UAV-assisted wireless networks.
Zero-Energy Reconfigurable Intelligent Surfaces (zeRIS)
May 12, 2023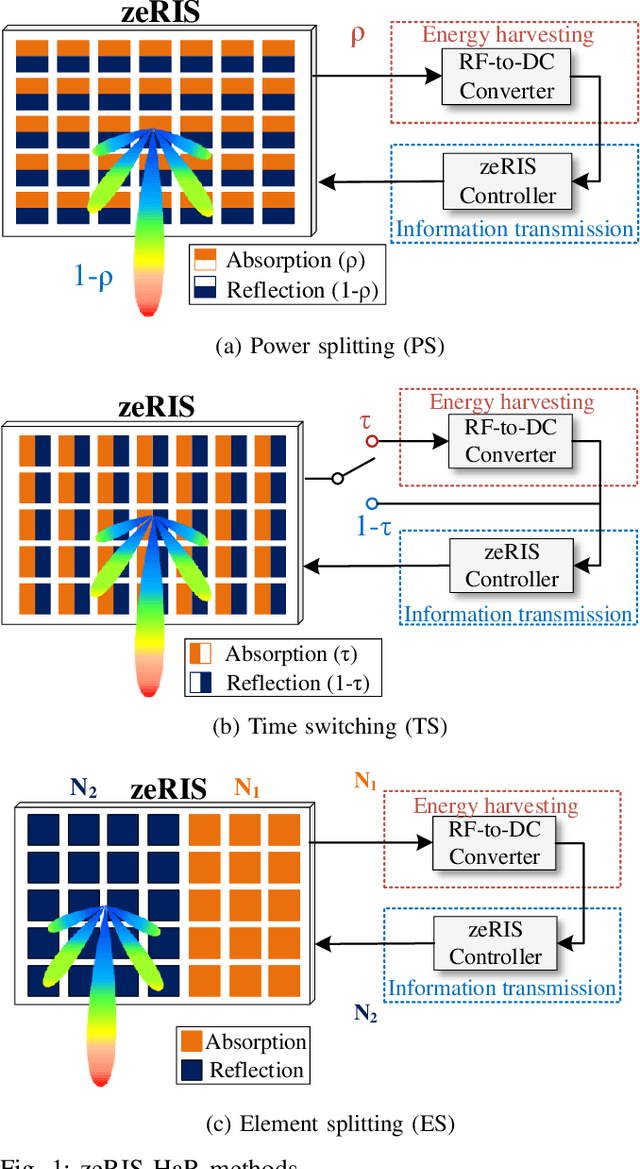
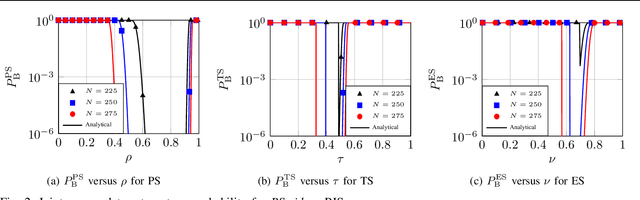
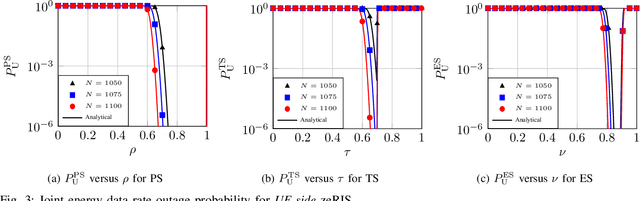
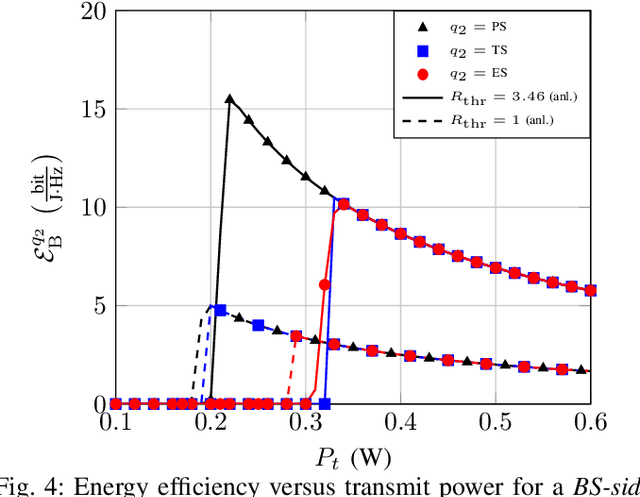
A primary objective of the forthcoming sixth generation (6G) of wireless networking is to support demanding applications, while ensuring energy efficiency. Programmable wireless environments (PWEs) have emerged as a promising solution, leveraging reconfigurable intelligent surfaces (RISs), to control wireless propagation and deliver exceptional quality-ofservice. In this paper, we analyze the performance of a network supported by zero-energy RISs (zeRISs), which harvest energy for their operation and contribute to the realization of PWEs. Specifically, we investigate joint energy-data rate outage probability and the energy efficiency of a zeRIS-assisted communication system by employing three harvest-and-reflect (HaR) methods, i) power splitting, ii) time switching, and iii) element splitting. Furthermore, we consider two zeRIS deployment strategies, namely BS-side zeRIS and UE-side zeRIS. Simulation results validate the provided analysis and examine which HaR method performs better depending on the zeRIS placement. Finally, valuable insights and conclusions for the performance of zeRISassisted wireless networks are drawn from the presented results.