 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyticsGPT: An LLM Workflow for Scientometric Question Answering
Feb 10, 2026This paper introduces AnalyticsGPT, an intuitive and efficient large language model (LLM)-powered workflow for scientometric question answering. This underrepresented downstream task addresses the subcategory of meta-scientific questions concerning the "science of science." When compared to traditional scientific question answering based on papers, the task poses unique challenges in the planning phase. Namely, the need for named-entity recognition of academic entities within questions and multi-faceted data retrieval involving scientometric indices, e.g. impact factors. Beyond their exceptional capacity for treating traditional natural language processing tasks, LLMs have shown great potential in more complex applications, such as task decomposition and planning and reasoning. In this paper, we explore the application of LLMs to scientometric question answering, and describe an end-to-end system implementing a sequential workflow with retrieval-augmented generation and agentic concepts. We also address the secondary task of effectively synthesizing the data into presentable and well-structured high-level analyses. As a database for retrieval-augmented generation, we leverage a proprietary research performance assessment platform. For evaluation, we consult experienced subject matter experts and leverage LLMs-as-judges. In doing so, we provide valuable insights on the efficacy of LLMs towards a niche downstream task. Our (skeleton) code and prompts are available at: https://github.com/lyvykhang/llm-agents-scientometric-qa/tree/acl.
Emotive Response to a Hybrid-Face Robot and Translation to Consumer Social Robots
Dec 08, 2020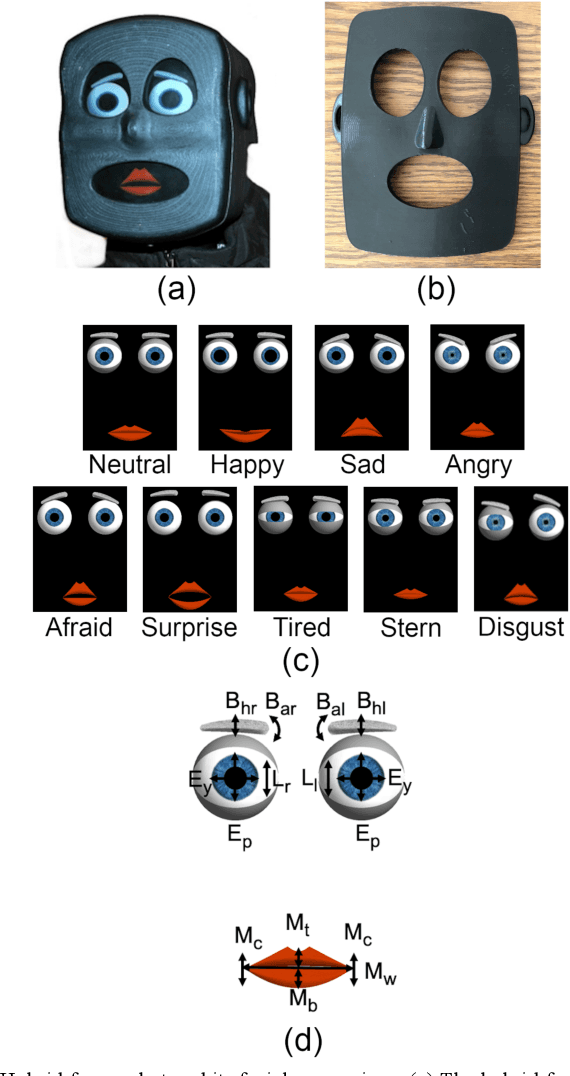
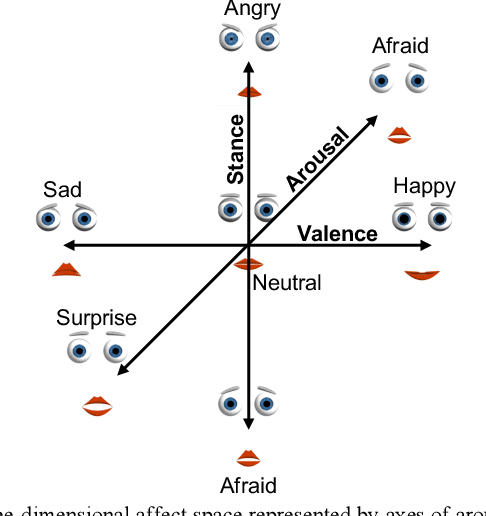
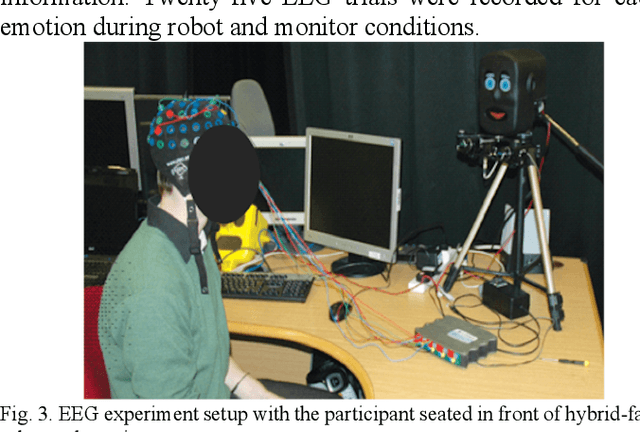
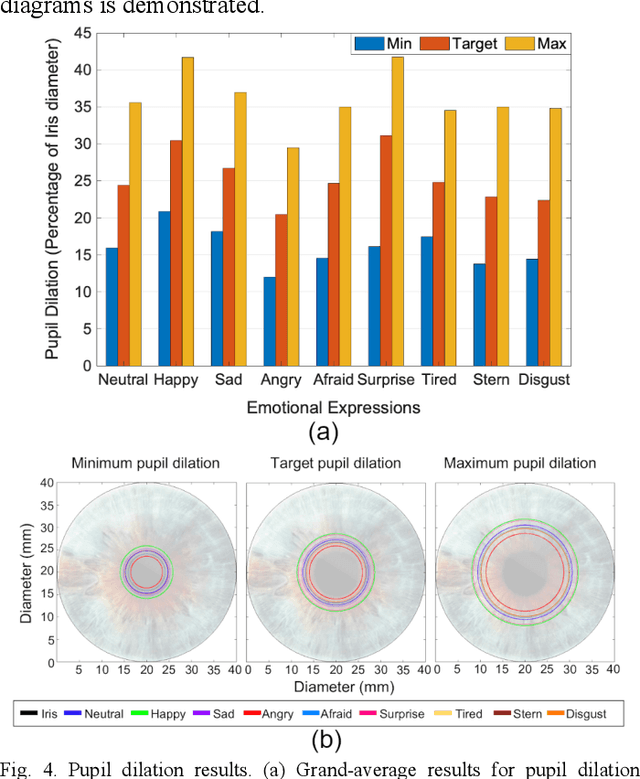
We introduce the conceptual formulation, design, fabrication, control and commercial translation with IoT connection of a hybrid-face social robot and validation of human emotional response to its affective interactions. The hybrid-face robot integrates a 3D printed faceplate and a digital display to simplify conveyance of complex facial movements while providing the impression of three-dimensional depth for natural interaction. We map the space of potential emotions of the robot to specific facial feature parameters and characterise the recognisability of the humanoid hybrid-face robot's archetypal facial expressions. We introduce pupil dilation as an additional degree of freedom for conveyance of emotive states. Human interaction experiments demonstrate the ability to effectively convey emotion from the hybrid-robot face to human observers by mapping their neurophysiological electroencephalography (EEG) response to perceived emotional information and through interviews. Results show main hybrid-face robotic expressions can be discriminated with recognition rates above 80% and invoke human emotive response similar to that of actual human faces as measured by the face-specific N170 event-related potentials in EEG. The hybrid-face robot concept has been modified, implemented, and released in the commercial IoT robotic platform Miko (My Companion), an affective robot with facial and conversational features currently in use for human-robot interaction in children by Emotix Inc. We demonstrate that human EEG responses to Miko emotions are comparative to neurophysiological responses for actual human facial recognition. Finally, interviews show above 90% expression recognition rates in our commercial robot. We conclude that simplified hybrid-face abstraction conveys emotions effectively and enhances human-robot interaction.