 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegration of an Agent Model into an Open Simulation Architecture for Scenario-Based Testing of Automated Vehicles
May 13, 2026Simulative and scenario-based testing are crucial methods in the safety assurance for automated driving systems. To ensure that simulation results are reliable, the real world must be modeled with sufficient fidelity, including not only the static environment but also the surrounding traffic of a vehicle under test. Thus, the availability of traffic agent models is of common interest to model naturalistic and parameterizable behavior, similar to human drivers. The interchangeability of agent models across different simulation environments represents a major challenge and necessitates harmonization and standardization. To address this challenge, we present a standardized and modular simulation integration architecture that enables the tool-independent integration of traffic agent models. The architecture builds upon the Open Simulation Interface (OSI) as a structured message format and the Functional Mock-up Interface (FMI) for dynamic model exchange. Rather than introducing yet another model or simulation tool, we provide a reusable reference implementation that translates these standards into a practical integration blueprint, including clear interfaces, data mappings, and execution semantics. The generic nature of the architecture is demonstrated by integrating an exemplary agent model into three widely used simulation environments: OpenPASS, CARLA, and CarMaker. As part of the evaluation, we show that the model yields consistent behavior in all simulation platforms, thereby validating the interoperability, modularity, and standard compliance of the proposed architecture. The reference implementation lowers integration barriers, serves as a foundation for future research, and is made publicly available at github.com/ika-rwth-aachen/agent-model-integration
CARLOS: An Open, Modular, and Scalable Simulation Framework for the Development and Testing of Software for C-ITS
Apr 04, 2024Future mobility systems and their components are increasingly defined by their software. The complexity of these cooperative intelligent transport systems (C-ITS) and the everchanging requirements posed at the software require continual software updates. The dynamic nature of the system and the practically innumerable scenarios in which different software components work together necessitate efficient and automated development and testing procedures that use simulations as one core methodology. The availability of such simulation architectures is a common interest among many stakeholders, especially in the field of automated driving. That is why we propose CARLOS - an open, modular, and scalable simulation framework for the development and testing of software in C-ITS that leverages the rich CARLA and ROS ecosystems. We provide core building blocks for this framework and explain how it can be used and extended by the community. Its architecture builds upon modern microservice and DevOps principles such as containerization and continuous integration. In our paper, we motivate the architecture by describing important design principles and showcasing three major use cases - software prototyping, data-driven development, and automated testing. We make CARLOS and example implementations of the three use cases publicly available at github.com/ika-rwth-aachen/carlos
High-Precision Digital Traffic Recording with Multi-LiDAR Infrastructure Sensor Setups
Jun 22, 2020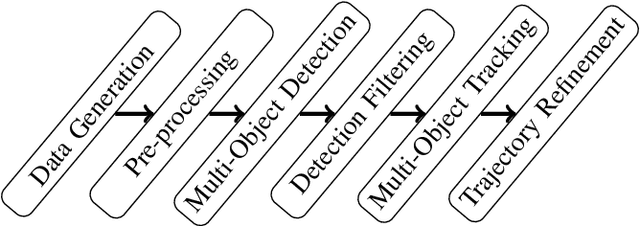
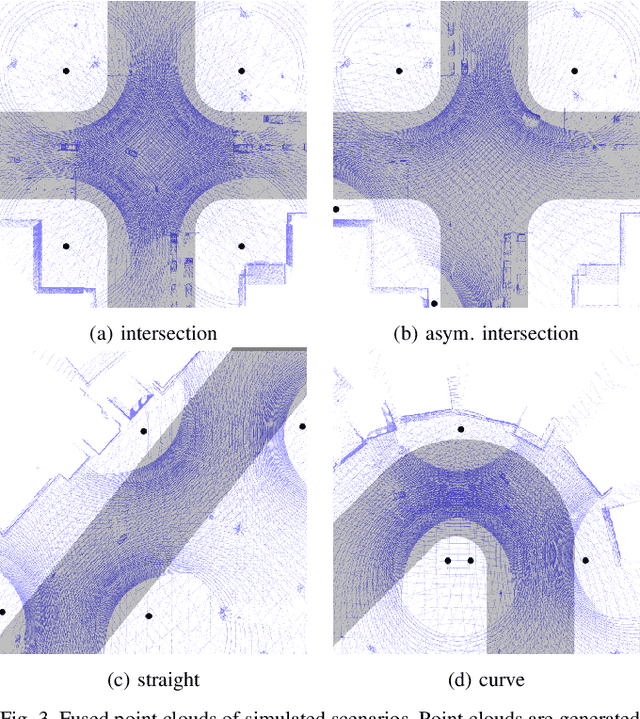
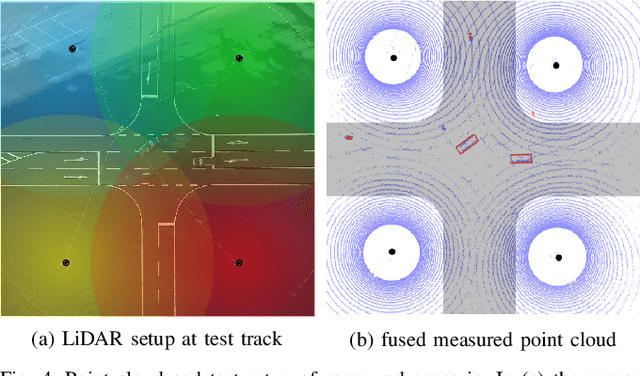
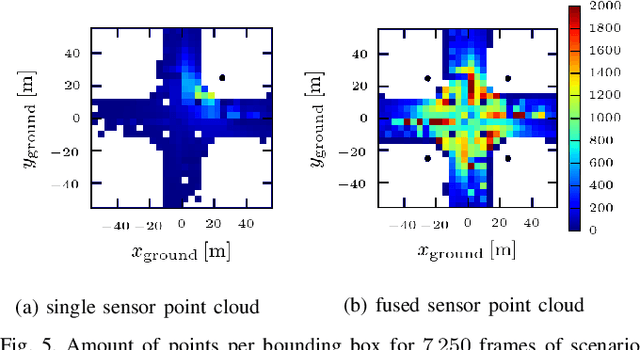
Large driving datasets are a key component in the current development and safeguarding of automated driving functions. Various methods can be used to collect such driving data records. In addition to the use of sensor equipped research vehicles or unmanned aerial vehicles (UAVs), the use of infrastructure sensor technology offers another alternative. To minimize object occlusion during data collection, it is crucial to record the traffic situation from several perspectives in parallel. A fusion of all raw sensor data might create better conditions for multi-object detection and tracking (MODT) compared to the use of individual raw sensor data. So far, no sufficient studies have been conducted to sufficiently confirm this approach. In our work we investigate the impact of fused LiDAR point clouds compared to single LiDAR point clouds. We model different urban traffic scenarios with up to eight 64-layer LiDARs in simulation and in reality. We then analyze the properties of the resulting point clouds and perform MODT for all emerging traffic participants. The evaluation of the extracted trajectories shows that a fused infrastructure approach significantly increases the tracking results and reaches accuracies within a few centimeters.