 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposite Distributed Learning and Synchronization of Nonlinear Multi-Agent Systems with Complete Uncertain Dynamics
Mar 01, 2024



This paper addresses the challenging problem of composite synchronization and learning control in a network of multi-agent robotic manipulator systems operating under heterogeneous nonlinear uncertainties within a leader-follower framework. A novel two-layer distributed adaptive learning control strategy is introduced, comprising a first-layer distributed cooperative estimator and a second-layer decentralized deterministic learning controller. The primary objective of the first layer is to facilitate each robotic agent's estimation of the leader's information. The second layer is responsible for both enabling individual robot agents to track desired reference trajectories and accurately identifying and learning their nonlinear uncertain dynamics. The proposed distributed learning control scheme represents an advancement in the existing literature due to its ability to manage robotic agents with completely uncertain dynamics including uncertain mass matrices. This framework allows the robotic control to be environment-independent which can be used in various settings, from underwater to space where identifying system dynamics parameters is challenging. The stability and parameter convergence of the closed-loop system are rigorously analyzed using the Lyapunov method. Numerical simulations conducted on multi-agent robot manipulators validate the effectiveness of the proposed scheme. The identified nonlinear dynamics can be saved and reused whenever the system restarts.
Invariant Filtering for Legged Humanoid Locomotion on Dynamic Rigid Surfaces
Jan 25, 2022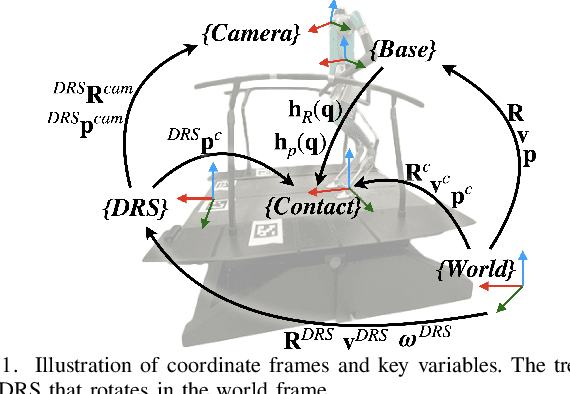
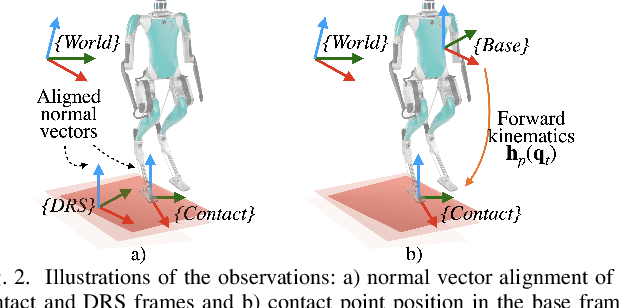
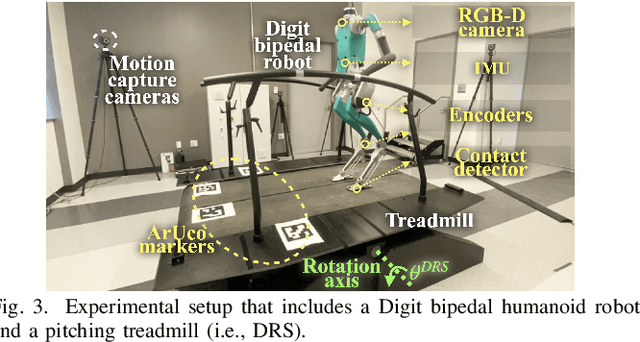
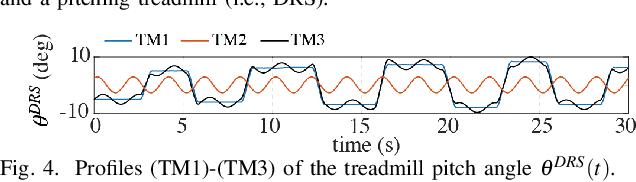
State estimation for legged locomotion over a dynamic rigid surface (DRS), which is a rigid surface moving in the world frame (e.g., ships, aircraft, and trains), remains an under-explored problem. This paper introduces an invariant extended Kalman filter that estimates the robot's pose and velocity during DRS locomotion by using common sensors of legged robots (e.g., inertial measurement units (IMU), joint encoders, and RDB-D camera). A key feature of the filter lies in that it explicitly addresses the nonstationary surface-foot contact point and the hybrid robot behaviors. Another key feature is that, in the absence of IMU biases, the filter satisfies the attractive group affine and invariant observation conditions, and is thus provably convergent for the deterministic continuous phases. The observability analysis is performed to reveal the effects of DRS movement on the state observability, and the convergence property of the hybrid, deterministic filter system is examined for the observable state variables. Experiments of a Digit humanoid robot walking on a pitching treadmill validate the effectiveness of the proposed filter under sensor noise and biases as well as large estimation errors and DRS movement.