 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Predictability of Multi-Tenant DNN Inference for Autonomous Vehicles' Perception
Feb 11, 2026Autonomous vehicles (AVs) rely on sensors and deep neural networks (DNNs) to perceive their surrounding environment and make maneuver decisions in real time. However, achieving real-time DNN inference in the AV's perception pipeline is challenging due to the large gap between the computation requirement and the AV's limited resources. Most, if not all, of existing studies focus on optimizing the DNN inference time to achieve faster perception by compressing the DNN model with pruning and quantization. In contrast, we present a Predictable Perception system with DNNs (PP-DNN) that reduce the amount of image data to be processed while maintaining the same level of accuracy for multi-tenant DNNs by dynamically selecting critical frames and regions of interest (ROIs). PP-DNN is based on our key insight that critical frames and ROIs for AVs vary with the AV's surrounding environment. However, it is challenging to identify and use critical frames and ROIs in multi-tenant DNNs for predictable inference. Given image-frame streams, PP-DNN leverages an ROI generator to identify critical frames and ROIs based on the similarities of consecutive frames and traffic scenarios. PP-DNN then leverages a FLOPs predictor to predict multiply-accumulate operations (MACs) from the dynamic critical frames and ROIs. The ROI scheduler coordinates the processing of critical frames and ROIs with multiple DNN models. Finally, we design a detection predictor for the perception of non-critical frames. We have implemented PP-DNN in an ROS-based AV pipeline and evaluated it with the BDD100K and the nuScenes dataset. PP-DNN is observed to significantly enhance perception predictability, increasing the number of fusion frames by up to 7.3x, reducing the fusion delay by >2.6x and fusion-delay variations by >2.3x, improving detection completeness by 75.4% and the cost-effectiveness by up to 98% over the baseline.
Trustworthy AI Inference Systems: An Industry Research View
Aug 10, 2020In this work, we provide an industry research view for approaching the design, deployment, and operation of trustworthy Artificial Intelligence (AI) inference systems. Such systems provide customers with timely, informed, and customized inferences to aid their decision, while at the same time utilizing appropriate security protection mechanisms for AI models. Additionally, such systems should also use Privacy-Enhancing Technologies (PETs) to protect customers' data at any time. To approach the subject, we start by introducing trends in AI inference systems. We continue by elaborating on the relationship between Intellectual Property (IP) and private data protection in such systems. Regarding the protection mechanisms, we survey the security and privacy building blocks instrumental in designing, building, deploying, and operating private AI inference systems. For example, we highlight opportunities and challenges in AI systems using trusted execution environments combined with more recent advances in cryptographic techniques to protect data in use. Finally, we outline areas of further development that require the global collective attention of industry, academia, and government researchers to sustain the operation of trustworthy AI inference systems.
Detecting Gas Vapor Leaks Using Uncalibrated Sensors
Aug 20, 2019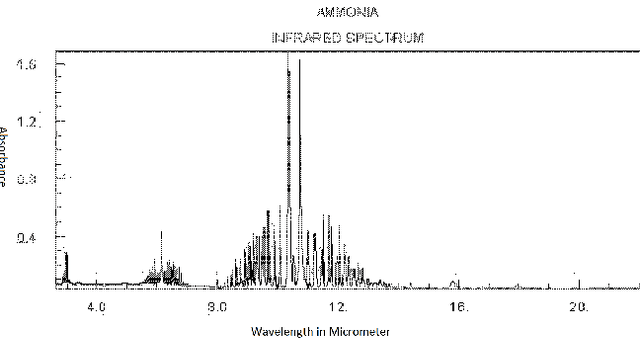
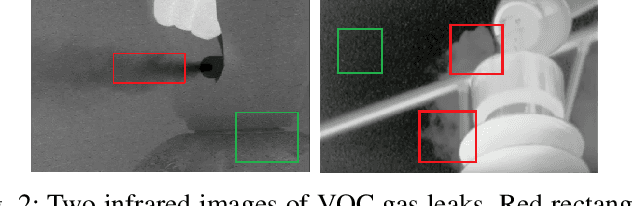
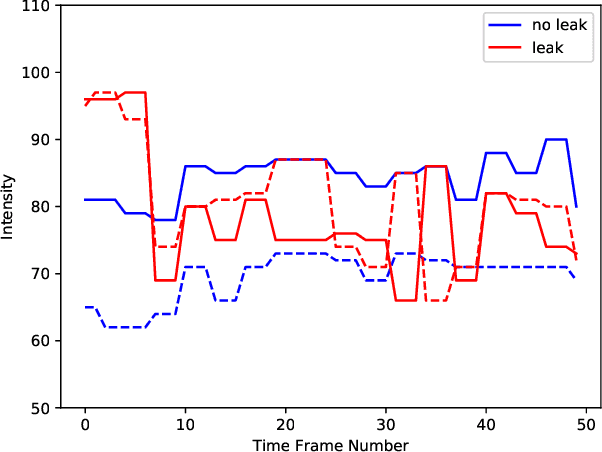
Chemical and infra-red sensors generate distinct responses under similar conditions because of sensor drift, noise or resolution errors. In this work, we use different time-series data sets obtained by infra-red and E-nose sensors in order to detect Volatile Organic Compounds (VOCs) and Ammonia vapor leaks. We process time-series sensor signals using deep neural networks (DNN). Three neural network algorithms are utilized for this purpose. Additive neural networks (termed AddNet) are based on a multiplication-devoid operator and consequently exhibit energy-efficiency compared to regular neural networks. The second algorithm uses generative adversarial neural networks so as to expose the classifying neural network to more realistic data points in order to help the classifier network to deliver improved generalization. Finally, we use conventional convolutional neural networks as a baseline method and compare their performance with the two aforementioned deep neural network algorithms in order to evaluate their effectiveness empirically.