 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDMSORT: An efficient parallel maritime multi-object tracking architecture for unmanned vessel platforms
Nov 16, 2025
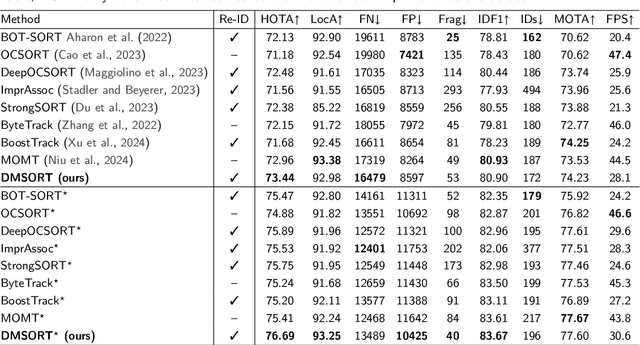

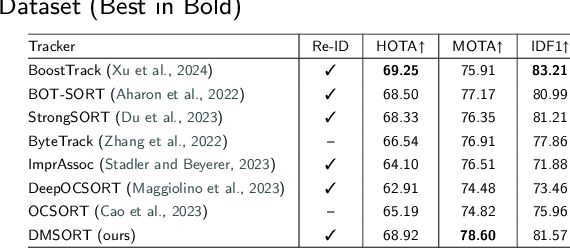
Accurate perception of the marine environment through robust multi-object tracking (MOT) is essential for ensuring safe vessel navigation and effective maritime surveillance. However, the complicated maritime environment often causes camera motion and subsequent visual degradation, posing significant challenges to MOT. To address this challenge, we propose an efficient Dual-branch Maritime SORT (DMSORT) method for maritime MOT. The core of the framework is a parallel tracker with affine compensation, which incorporates an object detection and re-identification (ReID) branch, along with a dedicated branch for dynamic camera motion estimation. Specifically, a Reversible Columnar Detection Network (RCDN) is integrated into the detection module to leverage multi-level visual features for robust object detection. Furthermore, a lightweight Transformer-based appearance extractor (Li-TAE) is designed to capture global contextual information and generate robust appearance features. Another branch decouples platform-induced and target-intrinsic motion by constructing a projective transformation, applying platform-motion compensation within the Kalman filter, and thereby stabilizing true object trajectories. Finally, a clustering-optimized feature fusion module effectively combines motion and appearance cues to ensure identity consistency under noise, occlusion, and drift. Extensive evaluations on the Singapore Maritime Dataset demonstrate that DMSORT achieves state-of-the-art performance. Notably, DMSORT attains the fastest runtime among existing ReID-based MOT frameworks while maintaining high identity consistency and robustness to jitter and occlusion. Code is available at: https://github.com/BiscuitsLzy/DMSORT-An-efficient-parallel-maritime-multi-object-tracking-architecture-.
HMPNet: A Feature Aggregation Architecture for Maritime Object Detection from a Shipborne Perspective
May 13, 2025In the realm of intelligent maritime navigation, object detection from a shipborne perspective is paramount. Despite the criticality, the paucity of maritime-specific data impedes the deployment of sophisticated visual perception techniques, akin to those utilized in autonomous vehicular systems, within the maritime context. To bridge this gap, we introduce Navigation12, a novel dataset annotated for 12 object categories under diverse maritime environments and weather conditions. Based upon this dataset, we propose HMPNet, a lightweight architecture tailored for shipborne object detection. HMPNet incorporates a hierarchical dynamic modulation backbone to bolster feature aggregation and expression, complemented by a matrix cascading poly-scale neck and a polymerization weight sharing detector, facilitating efficient multi-scale feature aggregation. Empirical evaluations indicate that HMPNet surpasses current state-of-the-art methods in terms of both accuracy and computational efficiency, realizing a 3.3% improvement in mean Average Precision over YOLOv11n, the prevailing model, and reducing parameters by 23%.
Underwater object detection in sonar imagery with detection transformer and Zero-shot neural architecture search
May 10, 2025



Underwater object detection using sonar imagery has become a critical and rapidly evolving research domain within marine technology. However, sonar images are characterized by lower resolution and sparser features compared to optical images, which seriously degrades the performance of object detection.To address these challenges, we specifically propose a Detection Transformer (DETR) architecture optimized with a Neural Architecture Search (NAS) approach called NAS-DETR for object detection in sonar images. First, an improved Zero-shot Neural Architecture Search (NAS) method based on the maximum entropy principle is proposed to identify a real-time, high-representational-capacity CNN-Transformer backbone for sonar image detection. This method enables the efficient discovery of high-performance network architectures with low computational and time overhead. Subsequently, the backbone is combined with a Feature Pyramid Network (FPN) and a deformable attention-based Transformer decoder to construct a complete network architecture. This architecture integrates various advanced components and training schemes to enhance overall performance. Extensive experiments demonstrate that this architecture achieves state-of-the-art performance on two Representative datasets, while maintaining minimal overhead in real-time efficiency and computational complexity. Furthermore, correlation analysis between the key parameters and differential entropy-based fitness function is performed to enhance the interpretability of the proposed framework. To the best of our knowledge, this is the first work in the field of sonar object detection to integrate the DETR architecture with a NAS search mechanism.
Dropout Strategy in Reinforcement Learning: Limiting the Surrogate Objective Variance in Policy Optimization Methods
Nov 03, 2023Policy-based reinforcement learning algorithms are widely used in various fields. Among them, mainstream policy optimization algorithms such as TRPO and PPO introduce importance sampling into policy iteration, which allows the reuse of historical data. However, this can also lead to a high variance of the surrogate objective and indirectly affects the stability and convergence of the algorithm. In this paper, we first derived an upper bound of the surrogate objective variance, which can grow quadratically with the increase of the surrogate objective. Next, we proposed the dropout technique to avoid the excessive increase of the surrogate objective variance caused by importance sampling. Then, we introduced a general reinforcement learning framework applicable to mainstream policy optimization methods, and applied the dropout technique to the PPO algorithm to obtain the D-PPO variant. Finally, we conduct comparative experiments between D-PPO and PPO algorithms in the Atari 2600 environment, and the results show that D-PPO achieved significant performance improvements compared to PPO, and effectively limited the excessive increase of the surrogate objective variance during training.