 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeaUToPath: Unified Planning and Control for Autonomous Vehicles in Urban Environments Using Hybrid Lattice and Free-Space Search
May 14, 2025This paper presents aUToPath, a unified online framework for global path-planning and control to address the challenge of autonomous navigation in cluttered urban environments. A key component of our framework is a novel hybrid planner that combines pre-computed lattice maps with dynamic free-space sampling to efficiently generate optimal driveable corridors in cluttered scenarios. Our system also features sequential convex programming (SCP)-based model predictive control (MPC) to refine the corridors into smooth, dynamically consistent trajectories. A single optimization problem is used to both generate a trajectory and its corresponding control commands; this addresses limitations of decoupled approaches by guaranteeing a safe and feasible path. Simulation results of the novel planner on randomly generated obstacle-rich scenarios demonstrate the success rate of a free-space Adaptively Informed Trees* (AIT*)-based planner, and runtimes comparable to a lattice-based planner. Real-world experiments of the full system on a Chevrolet Bolt EUV further validate performance in dense obstacle fields, demonstrating no violations of traffic, kinematic, or vehicle constraints, and a 100% success rate across eight trials.
More than just an auxiliary loss: Anti-spoofing Backbone Training via Adversarial Pseudo-depth Generation
Jan 01, 2021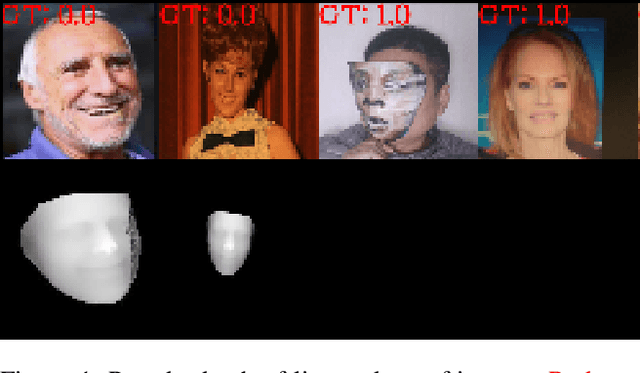

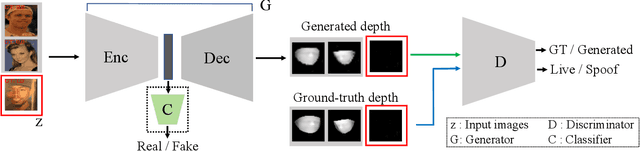

In this paper, a new method of training pipeline is discussed to achieve significant performance on the task of anti-spoofing with RGB image. We explore and highlight the impact of using pseudo-depth to pre-train a network that will be used as the backbone to the final classifier. While the usage of pseudo-depth for anti-spoofing task is not a new idea on its own, previous endeavours utilize pseudo-depth simply as another medium to extract features for performing prediction, or as part of many auxiliary losses in aiding the training of the main classifier, normalizing the importance of pseudo-depth as just another semantic information. Through this work, we argue that there exists a significant advantage in training the final classifier can be gained by the pre-trained generator learning to predict the corresponding pseudo-depth of a given facial image, from a Generative Adversarial Network framework. Our experimental results indicate that our method results in a much more adaptable system that can generalize beyond intra-dataset samples, but to inter-dataset samples, which it has never seen before during training. Quantitatively, our method approaches the baseline performance of the current state of the art anti-spoofing models with 15.8x less parameters used. Moreover, experiments showed that the introduced methodology performs well only using basic binary label without additional semantic information which indicates potential benefits of this work in industrial and application based environment where trade-off between additional labelling and resources are considered.