 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixVOD: Pixel-Distributed Direct Visual Odometry and Depth Estimation
Jun 02, 2026Images composed of 2D pixel arrays are the standard input to computer vision algorithms, yet many underlying computations can be distributed across pixels. Transmitting raw, redundant, and noisy pixel data off the sensor remains inefficient, motivating a shift toward focal-plane sensor-processors that perform a significant part of the computation directly within each pixel. We envision pixels synthesizing higher-level signals locally, reducing downstream load, and providing richer inputs for higher-level vision tasks. We propose a fully parallelizable form of visual odometry and depth estimation across pixels, where sensor-processors exchange information through Gaussian Belief Propagation (GBP) to achieve consensus about camera motion and infer depth from per-pixel photometric observations and a surface normal prior. To maintain geometric stability during optimization, we introduce a keyframe-like anchoring mechanism that regulates the effective baseline between frames, enabling consistent motion and depth updates. Our method is evaluated on realistic datasets, demonstrating the feasibility of GBP-based pixel-level distributed odometry and depth estimation with keyframe anchoring on-sensor. Project Page: https://www.shinjeongkim.com/pixvod/
U-ARE-ME: Uncertainty-Aware Rotation Estimation in Manhattan Environments
Mar 22, 2024



Camera rotation estimation from a single image is a challenging task, often requiring depth data and/or camera intrinsics, which are generally not available for in-the-wild videos. Although external sensors such as inertial measurement units (IMUs) can help, they often suffer from drift and are not applicable in non-inertial reference frames. We present U-ARE-ME, an algorithm that estimates camera rotation along with uncertainty from uncalibrated RGB images. Using a Manhattan World assumption, our method leverages the per-pixel geometric priors encoded in single-image surface normal predictions and performs optimisation over the SO(3) manifold. Given a sequence of images, we can use the per-frame rotation estimates and their uncertainty to perform multi-frame optimisation, achieving robustness and temporal consistency. Our experiments demonstrate that U-ARE-ME performs comparably to RGB-D methods and is more robust than sparse feature-based SLAM methods. We encourage the reader to view the accompanying video at https://callum-rhodes.github.io/U-ARE-ME for a visual overview of our method.
Structurally aware 3D gas distribution mapping using belief propagation: a real-time algorithm for robotic deployment
Dec 14, 2022



This paper proposes a new 3D gas distribution mapping technique based on the local message passing of Gaussian belief propagation that is capable of resolving in real time, concentration estimates in 3D space whilst accounting for the obstacle information within the scenario, the first of its kind in the literature. The gas mapping problem is formulated as a 3D factor graph of Gaussian potentials, the connections of which are conditioned on local occupancy values. The Gaussian belief propagation framework is introduced as the solver and a new hybrid message scheduler is introduced to increase the rate of convergence. The factor graph problem is then redesigned as a dynamically expanding inference task, coupling the information of consecutive gas measurements with local spatial structure obtained by the robot. The proposed algorithm is compared to the state of the art methods in 2D and 3D simulations and is found to resolve distribution maps orders of magnitude quicker than typical direct solvers. The proposed framework is then deployed for the first time onboard a ground robot in a 3D mapping and exploration task. The system is shown to be able to resolve multiple sensor inputs and output high resolution 3D gas distribution maps in a GPS denied cluttered scenario in real time. This online inference of complicated plume structures provides a new layer of contextual information over its 2D counterparts and enables autonomous systems to take advantage of real time estimates to inform potential next best sampling locations.
Autonomous search of an airborne release in urban environments using informed tree planning
Sep 08, 2021
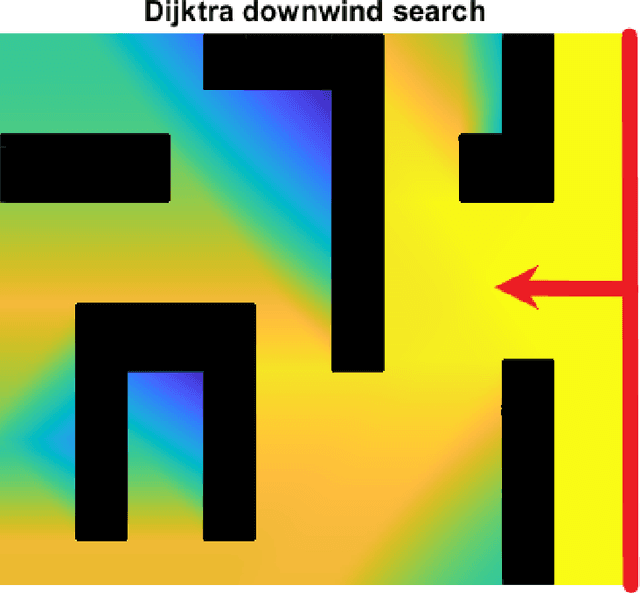

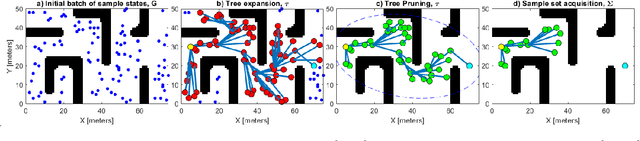
The use of autonomous vehicles for chemical source localisation is a key enabling tool for disaster response teams to safely and efficiently deal with chemical emergencies. Whilst much work has been performed on source localisation using autonomous systems, most previous works have assumed an open environment or employed simplistic obstacle avoidance, separate to the estimation procedure. In this paper, we explore the coupling of the path planning task for both source term estimation and obstacle avoidance in a holistic framework. The proposed system intelligently produces potential gas sampling locations based on the current estimation of the wind field and the local map. Then a tree search is performed to generate paths toward the estimated source location that traverse around any obstacles and still allow for exploration of potentially superior sampling locations. The proposed informed tree planning algorithm is then tested against the Entrotaxis technique in a series of high fidelity simulations. The proposed system is found to reduce source position error far more efficiently than Entrotaxis in a feature rich environment, whilst also exhibiting vastly more consistent and robust results.
Dual Control for Exploitation and Exploration (DCEE) in Autonomous Search
Dec 11, 2020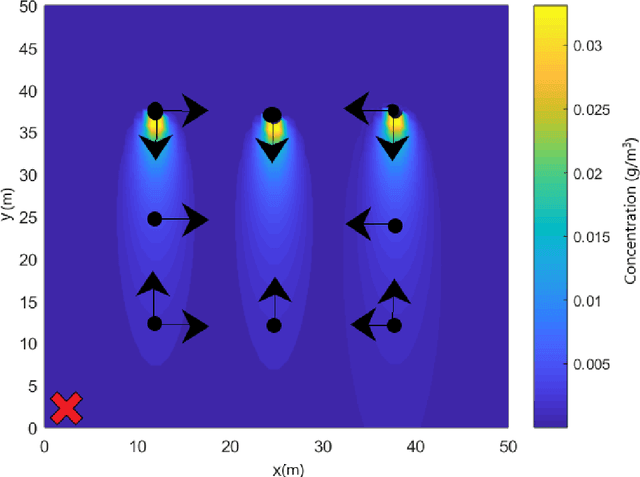
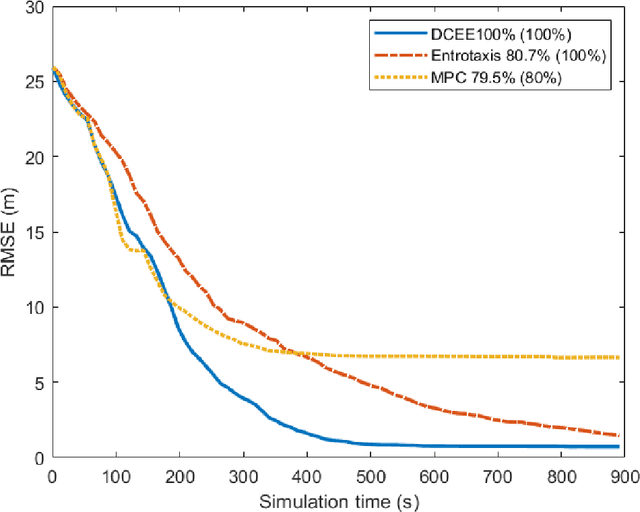
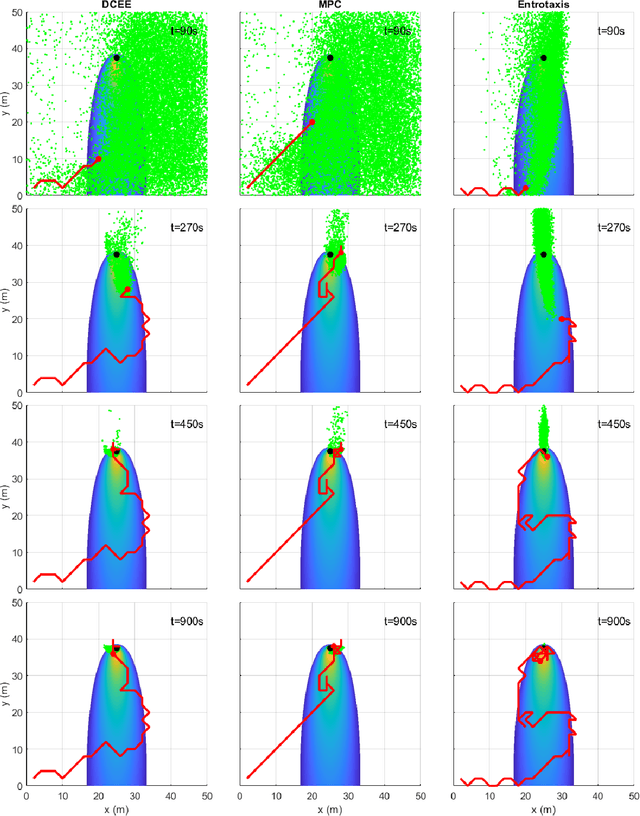
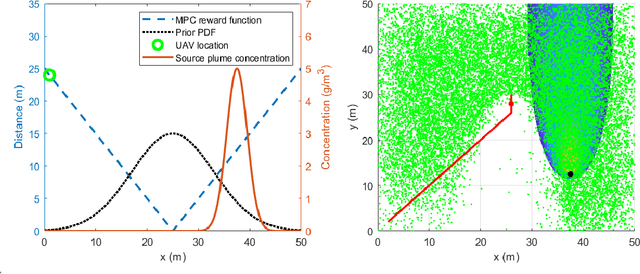
This paper proposes an optimal autonomous search framework, namely Dual Control for Exploration and Exploitation (DCEE), for a target at unknown location in an unknown environment. Source localisation is to find sources of atmospheric hazardous material release in a partially unknown environment. This paper proposes a control theoretic approach to this autonomous search problem. To cope with an unknown target location, at each step, the target location is estimated by Bayesian inference. Then a control action is taken to minimise the error between future robot position and the hypothesised future estimation of the target location. The latter is generated by hypothesised measurements at the corresponding future robot positions (due to the control action) with the current estimation of the target location as a prior. It shows that this approach can take into account both the error between the next robot position and the estimate of the target location, and the uncertainty of the estimate. This approach is further extended to the case with not only an unknown source location, but also an unknown local environment (e.g. wind speed and direction). Different from current information theoretic approaches, this new control theoretic approach achieves the optimal trade-off between exploitation and exploration in a unknown environment with an unknown target by driving the robot moving towards estimated target location while reducing its estimation uncertainty. This scheme is implemented using particle filtering on a mobile robot. Simulation and experimental studies demonstrate promising performance of the proposed approach. The relationships between the proposed approach, informative path planning, dual control, and classic model predictive control are discussed and compared.