 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-throughput fast full-color digital pathology based on Fourier ptychographic microscopy via color transfer
Jan 19, 2021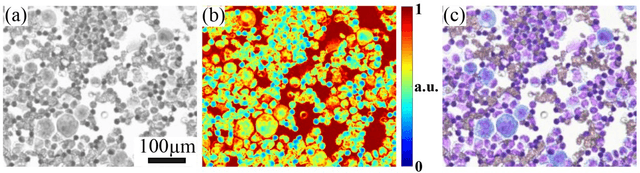
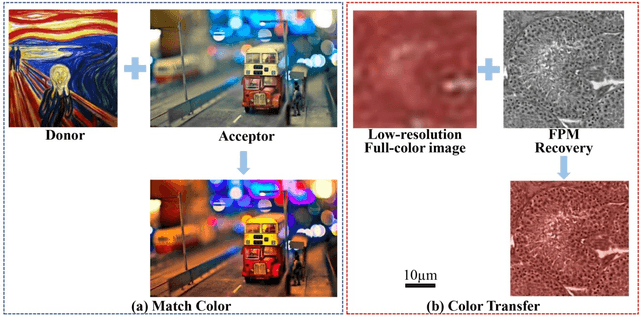
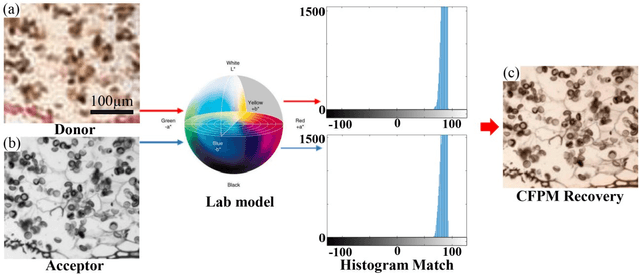
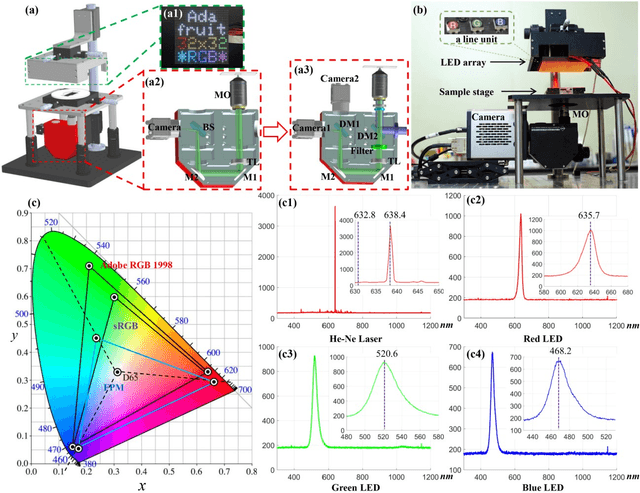
Full-color imaging is significant in digital pathology. Compared with a grayscale image or a pseudo-color image that only contains the contrast information, it can identify and detect the target object better with color texture information. Fourier ptychographic microscopy (FPM) is a high-throughput computational imaging technique that breaks the tradeoff between high resolution (HR) and large field-of-view (FOV), which eliminates the artifacts of scanning and stitching in digital pathology and improves its imaging efficiency. However, the conventional full-color digital pathology based on FPM is still time-consuming due to the repeated experiments with tri-wavelengths. A color transfer FPM approach, termed CFPM was reported. The color texture information of a low resolution (LR) full-color pathologic image is directly transferred to the HR grayscale FPM image captured by only a single wavelength. The color space of FPM based on the standard CIE-XYZ color model and display based on the standard RGB (sRGB) color space were established. Different FPM colorization schemes were analyzed and compared with thirty different biological samples. The average root-mean-square error (RMSE) of the conventional method and CFPM compared with the ground truth is 5.3% and 5.7%, respectively. Therefore, the acquisition time is significantly reduced by 2/3 with the sacrifice of precision of only 0.4%. And CFPM method is also compatible with advanced fast FPM approaches to reduce computation time further.
Histograms of Gaussian normal distribution for feature matching in clutter scenes
Jun 19, 2017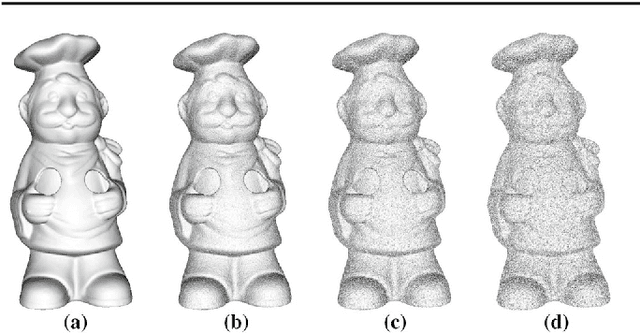
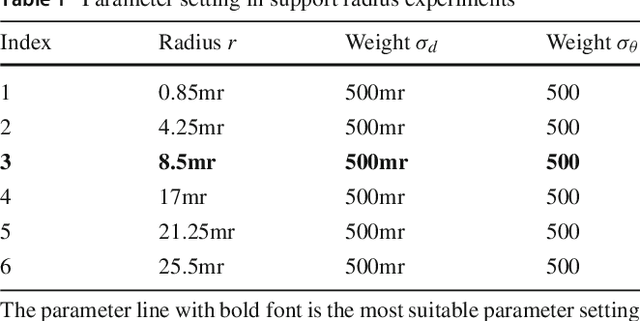
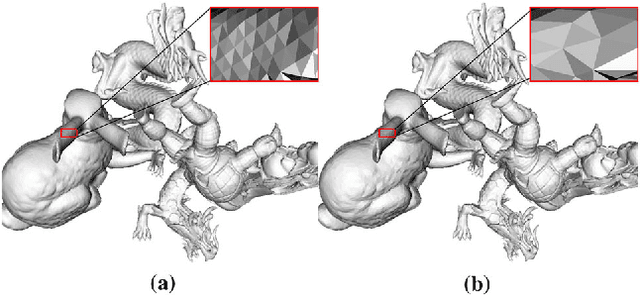
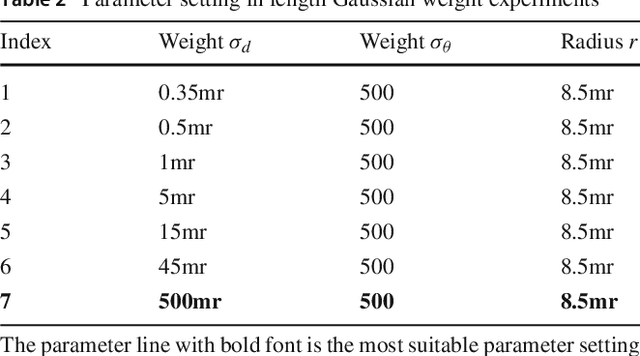
3D feature descriptor provide information between corresponding models and scenes. 3D objection recognition in cluttered scenes, however, remains a largely unsolved problem. Practical applications impose several challenges which are not fully addressed by existing methods. Especially in cluttered scenes there are many feature mismatches between scenes and models. We therefore propose Histograms of Gaussian Normal Distribution (HGND) for extracting salient features on a local reference frame (LRF) that enables us to solve this problem. We propose a LRF on each local surface patches using the scatter matrix's eigenvectors. Then the HGND information of each salient point is calculated on the LRF, for which we use both the mesh and point data of the depth image. Experiments on 45 cluttered scenes of the Bologna Dataset and 50 cluttered scenes of the UWA Dataset are made to evaluate the robustness and descriptiveness of our HGND. Experiments carried out by us demonstrate that HGND obtains a more reliable matching rate than state-of-the-art approaches in cluttered situations.