 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuture-Interactions-Aware Trajectory Prediction via Braid Theory
Mar 23, 2026To safely operate, an autonomous vehicle must know the future behavior of a potentially high number of interacting agents around it, a task often posed as multi-agent trajectory prediction. Many previous attempts to model social interactions and solve the joint prediction task either add extensive computational requirements or rely on heuristics to label multi-agent behavior types. Braid theory, in contrast, provides a powerful exact descriptor of multi-agent behavior by projecting future trajectories into braids that express how trajectories cross with each other over time; a braid then corresponds to a specific mode of coordination between the multiple agents in the future. In past work, braids have been used lightly to reason about interacting agents and restrict the attention window of predicted agents. We show that leveraging more fully the expressivity of the braid representation and using it to condition the trajectories themselves leads to even further gains in joint prediction performance, with negligible added complexity either in training or at inference time. We do so by proposing a novel auxiliary task, braid prediction, done in parallel with the trajectory prediction task. By classifying edges between agents into their correct crossing types in the braid representation, the braid prediction task is able to imbue the model with improved social awareness, which is reflected in joint predictions that more closely adhere to the actual multi-agent behavior. This simple auxiliary task allowed us to obtain significant improvements in joint metrics on three separate datasets. We show how the braid prediction task infuses the model with future intention awareness, leading to more accurate joint predictions. Code is available at github.com/caiocj1/traj-pred-braid-theory.
Improving Consistency in Vehicle Trajectory Prediction Through Preference Optimization
Jul 03, 2025Trajectory prediction is an essential step in the pipeline of an autonomous vehicle. Inaccurate or inconsistent predictions regarding the movement of agents in its surroundings lead to poorly planned maneuvers and potentially dangerous situations for the end-user. Current state-of-the-art deep-learning-based trajectory prediction models can achieve excellent accuracy on public datasets. However, when used in more complex, interactive scenarios, they often fail to capture important interdependencies between agents, leading to inconsistent predictions among agents in the traffic scene. Inspired by the efficacy of incorporating human preference into large language models, this work fine-tunes trajectory prediction models in multi-agent settings using preference optimization. By taking as input automatically calculated preference rankings among predicted futures in the fine-tuning process, our experiments--using state-of-the-art models on three separate datasets--show that we are able to significantly improve scene consistency while minimally sacrificing trajectory prediction accuracy and without adding any excess computational requirements at inference time.
Exploiting map information for self-supervised learning in motion forecasting
Oct 10, 2022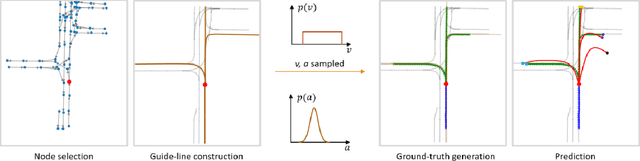
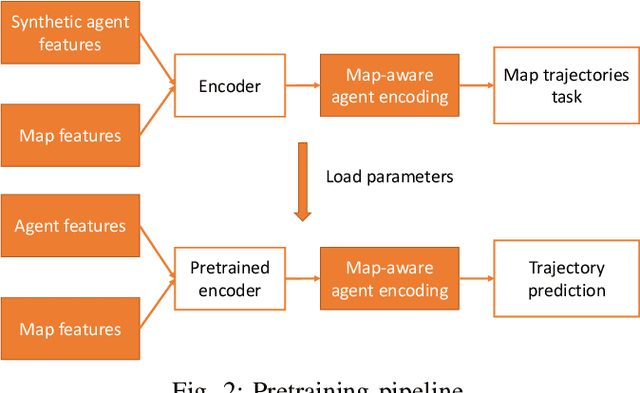
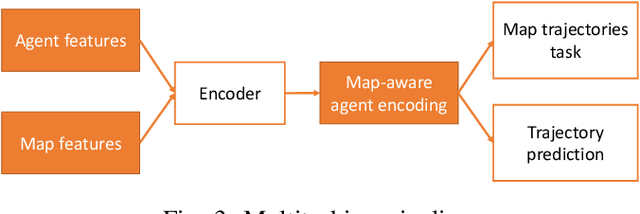
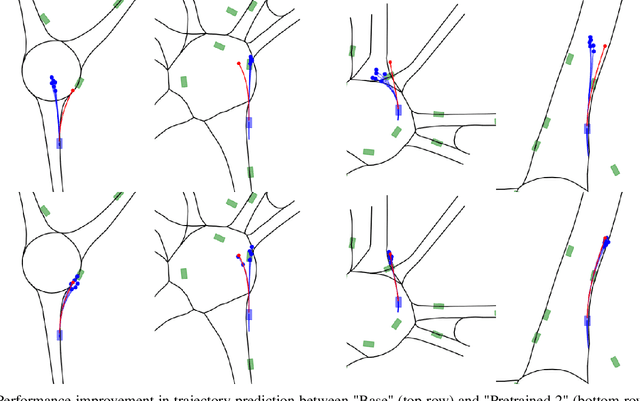
Inspired by recent developments regarding the application of self-supervised learning (SSL), we devise an auxiliary task for trajectory prediction that takes advantage of map-only information such as graph connectivity with the intent of improving map comprehension and generalization. We apply this auxiliary task through two frameworks - multitasking and pretraining. In either framework we observe significant improvement of our baseline in metrics such as $\mathrm{minFDE}_6$ (as much as 20.3%) and $\mathrm{MissRate}_6$ (as much as 33.3%), as well as a richer comprehension of map features demonstrated by different training configurations. The results obtained were consistent in all three data sets used for experiments: Argoverse, Interaction and NuScenes. We also submit our new pretrained model's results to the Interaction challenge and achieve $\textit{1st}$ place with respect to $\mathrm{minFDE}_6$ and $\mathrm{minADE}_6$.