 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Foot-Mounted Inertial Navigation Through Real-Time Motion Classification
Jul 13, 2018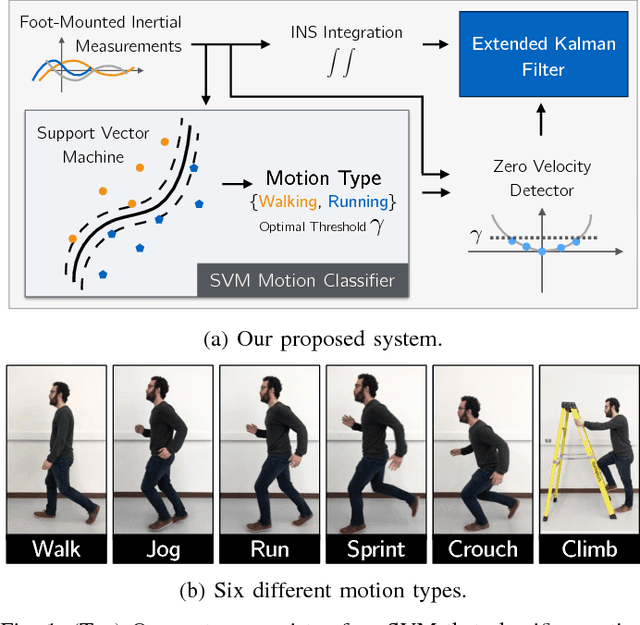
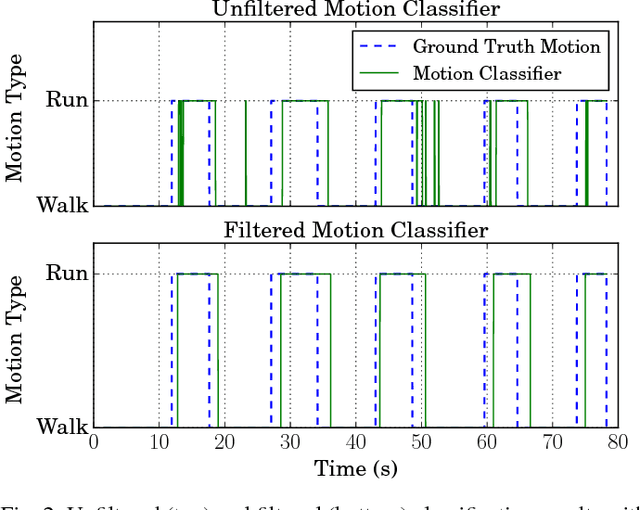
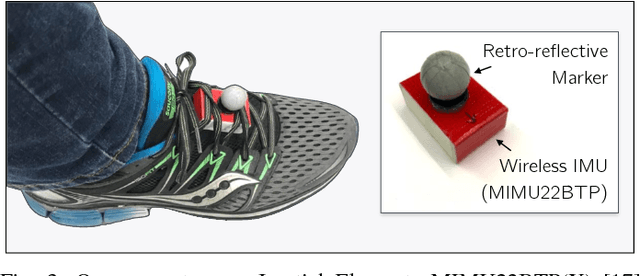
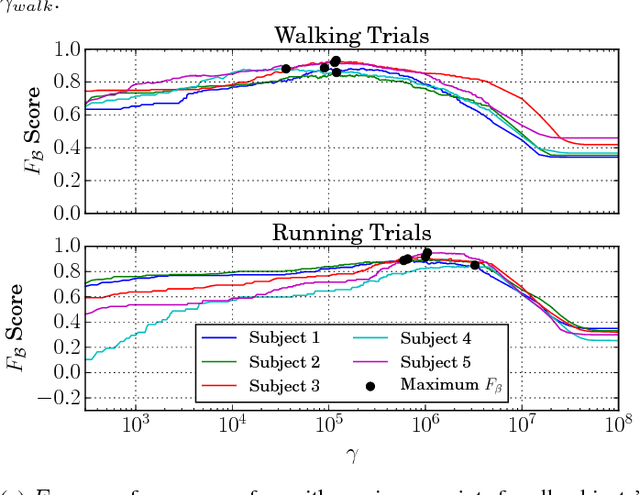
We present a method to improve the accuracy of a foot-mounted, zero-velocity-aided inertial navigation system (INS) by varying estimator parameters based on a real-time classification of motion type. We train a support vector machine (SVM) classifier using inertial data recorded by a single foot-mounted sensor to differentiate between six motion types (walking, jogging, running, sprinting, crouch-walking, and ladder-climbing) and report mean test classification accuracy of over 90% on a dataset with five different subjects. From these motion types, we select two of the most common (walking and running), and describe a method to compute optimal zero-velocity detection parameters tailored to both a specific user and motion type by maximizing the detector F-score. By combining the motion classifier with a set of optimal detection parameters, we show how we can reduce INS position error during mixed walking and running motion. We evaluate our adaptive system on a total of 5.9 km of indoor pedestrian navigation performed by five different subjects moving along a 130 m path with surveyed ground truth markers.
LSTM-Based Zero-Velocity Detection for Robust Inertial Navigation
Jul 13, 2018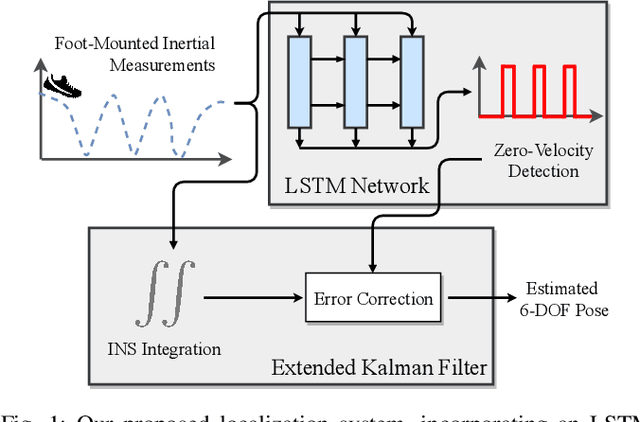
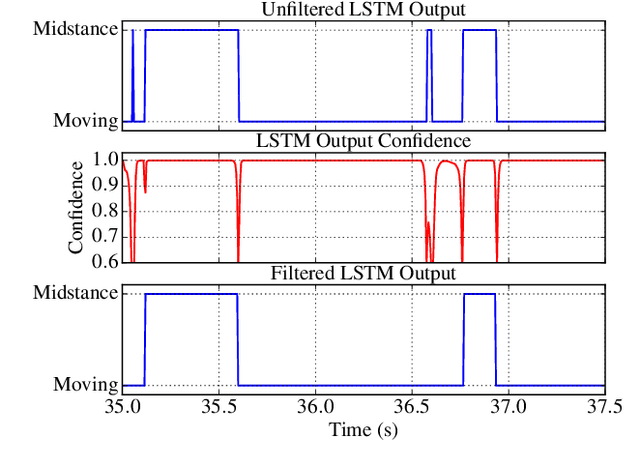
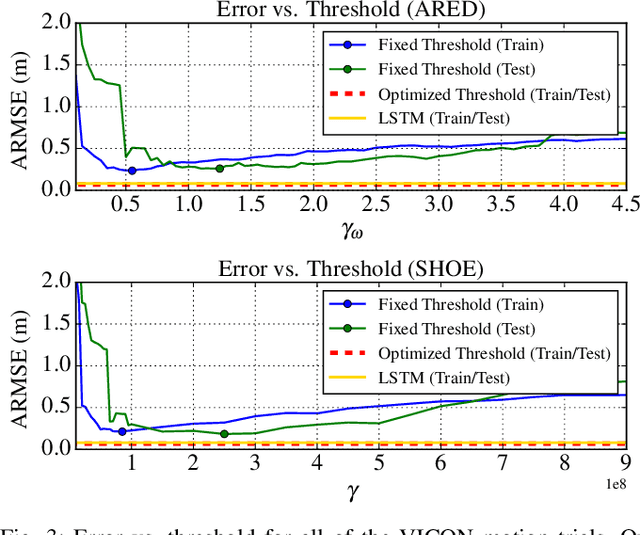
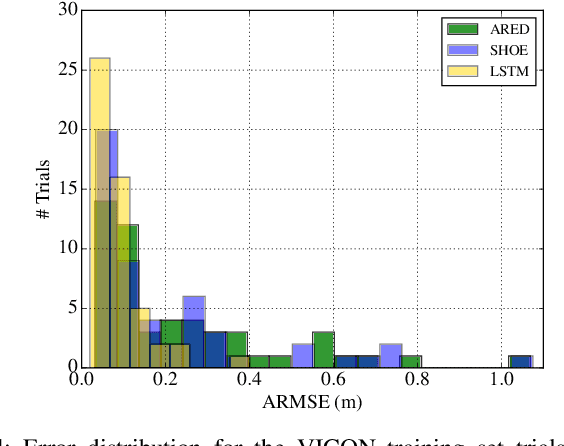
We present a method to improve the accuracy of a zero-velocity-aided inertial navigation system (INS) by replacing the standard zero-velocity detector with a long short-term memory (LSTM) neural network. While existing threshold-based zero-velocity detectors are not robust to varying motion types, our learned model accurately detects stationary periods of the inertial measurement unit (IMU) despite changes in the motion of the user. Upon detection, zero-velocity pseudo-measurements are fused with a dead reckoning motion model in an extended Kalman filter (EKF). We demonstrate that our LSTM-based zero-velocity detector, used within a zero-velocity-aided INS, improves zero-velocity detection during human localization tasks. Consequently, localization accuracy is also improved. Our system is evaluated on more than 7.5 km of indoor pedestrian locomotion data, acquired from five different subjects. We show that 3D positioning error is reduced by over 34% compared to existing fixed-threshold zero-velocity detectors for walking, running, and stair climbing motions. Additionally, we demonstrate how our learned zero-velocity detector operates effectively during crawling and ladder climbing. Our system is calibration-free (no careful threshold-tuning is required) and operates consistently with differing users, IMU placements, and shoe types, while being compatible with any generic zero-velocity-aided INS.