 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Inspection and Task-Based Access Control in Zero-Trust Agentic AI
May 04, 2026Authorizing Large Language Model (LLM)-driven agents to dynamically invoke tools and access protected resources introduces significant security risks, and the risks grow dramatically as agents engage in multi-turn conversations and scale toward distributed collaboration. A compromised or malicious agentic application can tamper with tool calls, falsify results, or request permissions beyond the scope of the subject's intended tasks, which could go unnoticed with current delegated authorization flows given their lack of visibility into the original subject's intent. In light of this, we make the following contributions towards Continuous Agent Semantic Authorization (CASA). First, we propose a hybrid runtime enforcement model that combines deterministic and semantic controls enabled by a zero-trust interception layer. Five deterministic controls enforce structural and data-integrity guarantees over the message flow, while a semantic inspection layer evaluates whether tool call choices align with the intended tasks commissioned to the agent. Second, differently from prior Task-Based Access Control (TBAC) techniques that operate on single-turn interactions, we decompose the semantic layer into two stages: i) a task-extraction step that distills the subject's objectives from multi-turn conversations at the interception layer, and ii) a task-tool semantic matching step at the authorization server that evaluates whether the requested tools are appropriate for the extracted tasks. Third, we extend the ASTRA dataset that we introduced in a prior work, by generating novel conversation-tool datasets with multi-turn interactions containing relevant and irrelevant tool calls for a given task. Lastly, we provide the first experimental results for TBAC under multi-turn conversations.
Delegated Authorization for Agents Constrained to Semantic Task-to-Scope Matching
Oct 30, 2025Authorizing Large Language Model driven agents to dynamically invoke tools and access protected resources introduces significant risks, since current methods for delegating authorization grant overly broad permissions and give access to tools allowing agents to operate beyond the intended task scope. We introduce and assess a delegated authorization model enabling authorization servers to semantically inspect access requests to protected resources, and issue access tokens constrained to the minimal set of scopes necessary for the agents' assigned tasks. Given the unavailability of datasets centered on delegated authorization flows, particularly including both semantically appropriate and inappropriate scope requests for a given task, we introduce ASTRA, a dataset and data generation pipeline for benchmarking semantic matching between tasks and scopes. Our experiments show both the potential and current limitations of model-based matching, particularly as the number of scopes needed for task completion increases. Our results highlight the need for further research into semantic matching techniques enabling intent-aware authorization for multi-agent and tool-augmented applications, including fine-grained control, such as Task-Based Access Control (TBAC).
Driver Identification via the Steering Wheel
Sep 09, 2019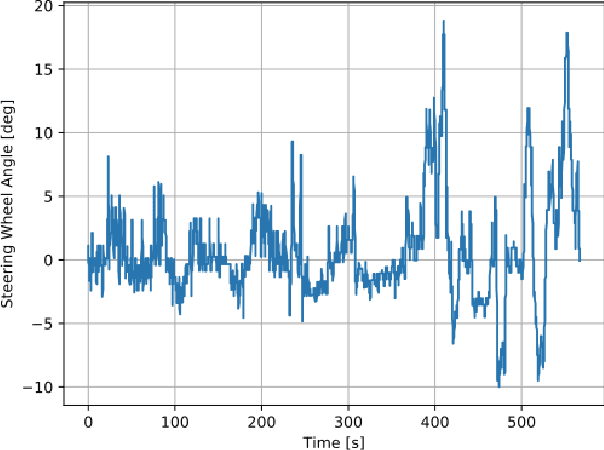
Driver identification has emerged as a vital research field, where both practitioners and researchers investigate the potential of driver identification to enable a personalized driving experience. Within recent years, a selection of studies have reported that individuals could be perfectly identified based on their driving behavior under controlled conditions. However, research investigating the potential of driver identification under naturalistic conditions claim accuracies only marginally higher than random guess. The paper at hand provides a comprehensive summary of the recent work, highlighting the main discrepancies in the design of the machine learning approaches, primarily the window length parameter that was considered. Key findings further indicate that the longitudinal vehicle control information is particularly useful for driver identification, leaving the research gap on the extent to which the lateral vehicle control can be used for reliable identification. Building upon existing work, we provide a novel approach for the design of the window length parameter that provides evidence that reliable driver identification can be achieved with data limited to the steering wheel only. The results and insights in this paper are based on data collected from the largest naturalistic driving study conducted in this field. Overall, a neural network based on GRUs was found to provide better identification performance than traditional methods, increasing the prediction accuracy from under 15\% to over 65\% for 15 drivers. When leveraging the full field study dataset, comprising 72 drivers, the accuracy of identification prediction of the approach improved a random guess approach by a factor of 25.