 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdding internal audio sensing to internal vision enables human-like in-hand fabric recognition with soft robotic fingertips
Feb 13, 2026Distinguishing the feel of smooth silk from coarse cotton is a trivial everyday task for humans. When exploring such fabrics, fingertip skin senses both spatio-temporal force patterns and texture-induced vibrations that are integrated to form a haptic representation of the explored material. It is challenging to reproduce this rich, dynamic perceptual capability in robots because tactile sensors typically cannot achieve both high spatial resolution and high temporal sampling rate. In this work, we present a system that can sense both types of haptic information, and we investigate how each type influences robotic tactile perception of fabrics. Our robotic hand's middle finger and thumb each feature a soft tactile sensor: one is the open-source Minsight sensor that uses an internal camera to measure fingertip deformation and force at 50 Hz, and the other is our new sensor Minsound that captures vibrations through an internal MEMS microphone with a bandwidth from 50 Hz to 15 kHz. Inspired by the movements humans make to evaluate fabrics, our robot actively encloses and rubs folded fabric samples between its two sensitive fingers. Our results test the influence of each sensing modality on overall classification performance, showing high utility for the audio-based sensor. Our transformer-based method achieves a maximum fabric classification accuracy of 97 % on a dataset of 20 common fabrics. Incorporating an external microphone away from Minsound increases our method's robustness in loud ambient noise conditions. To show that this audio-visual tactile sensing approach generalizes beyond the training data, we learn general representations of fabric stretchiness, thickness, and roughness.
Visuo-Tactile Object Pose Estimation for a Multi-Finger Robot Hand with Low-Resolution In-Hand Tactile Sensing
Mar 25, 2025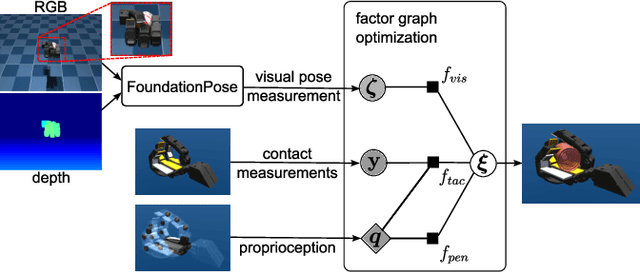
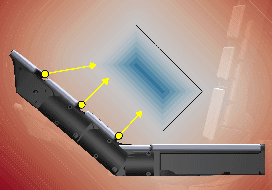
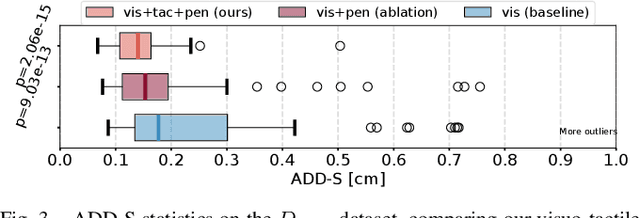
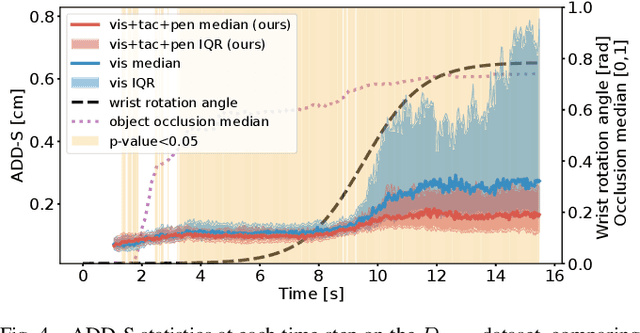
Accurate 3D pose estimation of grasped objects is an important prerequisite for robots to perform assembly or in-hand manipulation tasks, but object occlusion by the robot's own hand greatly increases the difficulty of this perceptual task. Here, we propose that combining visual information and proprioception with binary, low-resolution tactile contact measurements from across the interior surface of an articulated robotic hand can mitigate this issue. The visuo-tactile object-pose-estimation problem is formulated probabilistically in a factor graph. The pose of the object is optimized to align with the three kinds of measurements using a robust cost function to reduce the influence of visual or tactile outlier readings. The advantages of the proposed approach are first demonstrated in simulation: a custom 15-DoF robot hand with one binary tactile sensor per link grasps 17 YCB objects while observed by an RGB-D camera. This low-resolution in-hand tactile sensing significantly improves object-pose estimates under high occlusion and also high visual noise. We also show these benefits through grasping tests with a preliminary real version of our tactile hand, obtaining reasonable visuo-tactile estimates of object pose at approximately 13.3 Hz on average.