 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecipeMasterLLM: Revisiting RoboEarth in the Era of Large Language Models
Dec 19, 2025RoboEarth was a pioneering initiative in cloud robotics, establishing a foundational framework for robots to share and exchange knowledge about actions, objects, and environments through a standardized knowledge graph. Initially, this knowledge was predominantly hand-crafted by engineers using RDF triples within OWL Ontologies, with updates, such as changes in an object's pose, being asserted by the robot's control and perception routines. However, with the advent and rapid development of Large Language Models (LLMs), we believe that the process of knowledge acquisition can be significantly automated. To this end, we propose RecipeMasterLLM, a high-level planner, that generates OWL action ontologies based on a standardized knowledge graph in response to user prompts. This architecture leverages a fine-tuned LLM specifically trained to understand and produce action descriptions consistent with the RoboEarth standardized knowledge graph. Moreover, during the Retrieval-Augmented Generation (RAG) phase, environmental knowledge is supplied to the LLM to enhance its contextual understanding and improve the accuracy of the generated action descriptions.
Robot Program Parameter Inference via Differentiable Shadow Program Inversion
Mar 26, 2021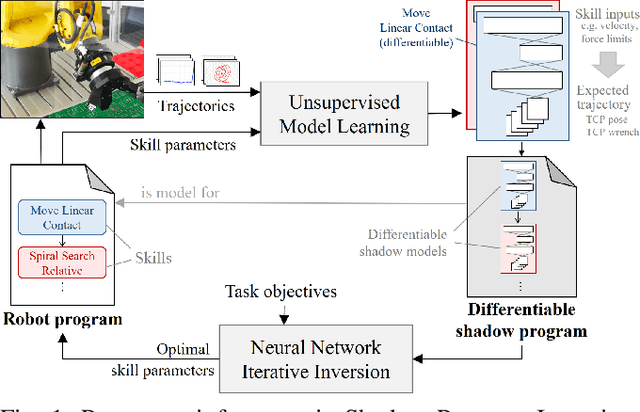
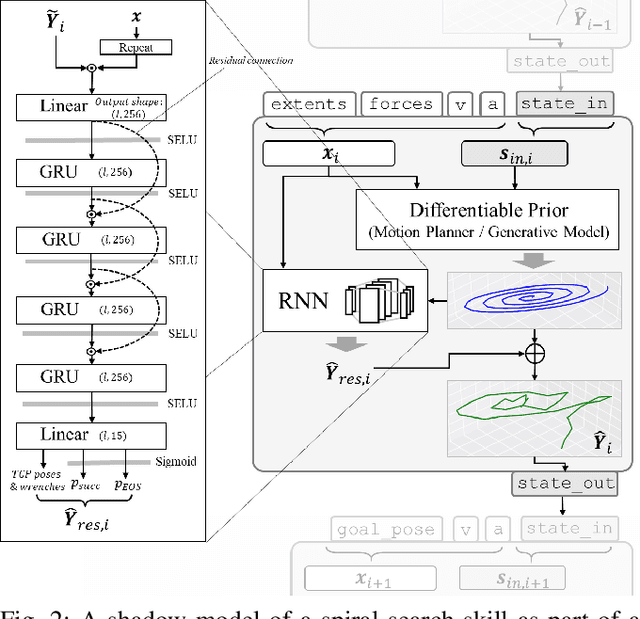
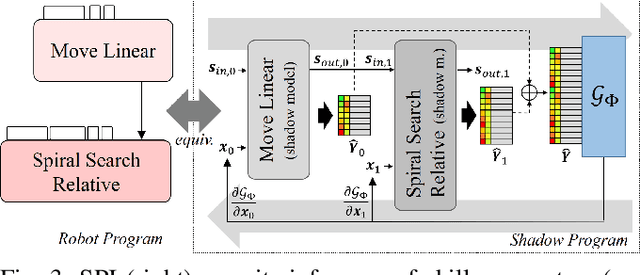
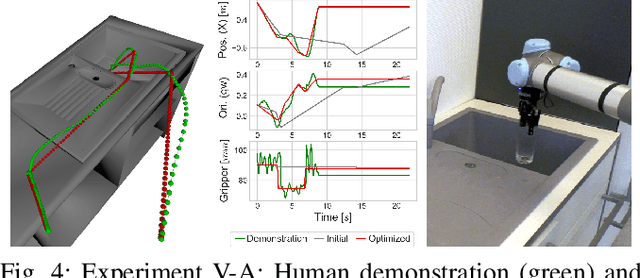
Challenging manipulation tasks can be solved effectively by combining individual robot skills, which must be parameterized for the concrete physical environment and task at hand. This is time-consuming and difficult for human programmers, particularly for force-controlled skills. To this end, we present Shadow Program Inversion (SPI), a novel approach to infer optimal skill parameters directly from data. SPI leverages unsupervised learning to train an auxiliary differentiable program representation ("shadow program") and realizes parameter inference via gradient-based model inversion. Our method enables the use of efficient first-order optimizers to infer optimal parameters for originally non-differentiable skills, including many skill variants currently used in production. SPI zero-shot generalizes across task objectives, meaning that shadow programs do not need to be retrained to infer parameters for different task variants. We evaluate our methods on three different robots and skill frameworks in industrial and household scenarios. Code and examples are available at https://innolab.artiminds.com/icra2021.