 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Guardrails for Open-World Decision Making in Autonomous Drone Swarms
May 29, 2025
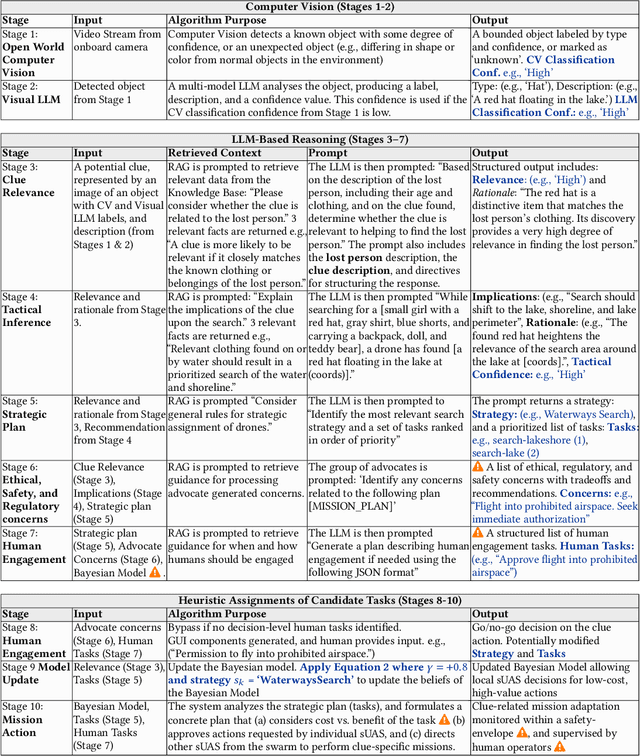
Small Uncrewed Aerial Systems (sUAS) are increasingly deployed as autonomous swarms in search-and-rescue and other disaster-response scenarios. In these settings, they use computer vision (CV) to detect objects of interest and autonomously adapt their missions. However, traditional CV systems often struggle to recognize unfamiliar objects in open-world environments or to infer their relevance for mission planning. To address this, we incorporate large language models (LLMs) to reason about detected objects and their implications. While LLMs can offer valuable insights, they are also prone to hallucinations and may produce incorrect, misleading, or unsafe recommendations. To ensure safe and sensible decision-making under uncertainty, high-level decisions must be governed by cognitive guardrails. This article presents the design, simulation, and real-world integration of these guardrails for sUAS swarms in search-and-rescue missions.
Psych-Occlusion: Using Visual Psychophysics for Aerial Detection of Occluded Persons during Search and Rescue
Dec 07, 2024



The success of Emergency Response (ER) scenarios, such as search and rescue, is often dependent upon the prompt location of a lost or injured person. With the increasing use of small Unmanned Aerial Systems (sUAS) as "eyes in the sky" during ER scenarios, efficient detection of persons from aerial views plays a crucial role in achieving a successful mission outcome. Fatigue of human operators during prolonged ER missions, coupled with limited human resources, highlights the need for sUAS equipped with Computer Vision (CV) capabilities to aid in finding the person from aerial views. However, the performance of CV models onboard sUAS substantially degrades under real-life rigorous conditions of a typical ER scenario, where person search is hampered by occlusion and low target resolution. To address these challenges, we extracted images from the NOMAD dataset and performed a crowdsource experiment to collect behavioural measurements when humans were asked to "find the person in the picture". We exemplify the use of our behavioral dataset, Psych-ER, by using its human accuracy data to adapt the loss function of a detection model. We tested our loss adaptation on a RetinaNet model evaluated on NOMAD against increasing distance and occlusion, with our psychophysical loss adaptation showing improvements over the baseline at higher distances across different levels of occlusion, without degrading performance at closer distances. To the best of our knowledge, our work is the first human-guided approach to address the location task of a detection model, while addressing real-world challenges of aerial search and rescue. All datasets and code can be found at: https://github.com/ArtRuss/NOMAD.
NOMAD: A Natural, Occluded, Multi-scale Aerial Dataset, for Emergency Response Scenarios
Sep 18, 2023



With the increasing reliance on small Unmanned Aerial Systems (sUAS) for Emergency Response Scenarios, such as Search and Rescue, the integration of computer vision capabilities has become a key factor in mission success. Nevertheless, computer vision performance for detecting humans severely degrades when shifting from ground to aerial views. Several aerial datasets have been created to mitigate this problem, however, none of them has specifically addressed the issue of occlusion, a critical component in Emergency Response Scenarios. Natural Occluded Multi-scale Aerial Dataset (NOMAD) presents a benchmark for human detection under occluded aerial views, with five different aerial distances and rich imagery variance. NOMAD is composed of 100 different Actors, all performing sequences of walking, laying and hiding. It includes 42,825 frames, extracted from 5.4k resolution videos, and manually annotated with a bounding box and a label describing 10 different visibility levels, categorized according to the percentage of the human body visible inside the bounding box. This allows computer vision models to be evaluated on their detection performance across different ranges of occlusion. NOMAD is designed to improve the effectiveness of aerial search and rescue and to enhance collaboration between sUAS and humans, by providing a new benchmark dataset for human detection under occluded aerial views.