 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarchuk: Efficient Global Weather Forecasting from Mid-Range to Sub-Seasonal Scales via Flow Matching
Mar 25, 2026Accurate subseasonal weather forecasting remains a major challenge due to the inherently chaotic nature of the atmosphere, which limits the predictive skill of conventional models beyond the mid-range horizon (approximately 15 days). In this work, we present \textit{Marchuk}, a generative latent flow-matching model for global weather forecasting spanning mid-range to subseasonal timescales, with prediction horizons of up to 30 days. Marchuk conditions on current-day weather maps and autoregressively predicts subsequent days' weather maps within the learned latent space. We replace rotary positional encodings (RoPE) with trainable positional embeddings and extend the temporal context window, which together enhance the model's ability to represent and propagate long-range temporal dependencies during latent forecasting. Marchuk offers two key advantages: high computational efficiency and strong predictive performance. Despite its compact architecture of only 276 million parameters, the model achieves performance comparable to LaDCast, a substantially larger model with 1.6 billion parameters, while operating at significantly higher inference speeds. We open-source our inference code and model at: https://v-gen-ai.github.io/Marchuk/
Adaptation of Quadruped Robot Locomotion with Meta-Learning
Jul 08, 2021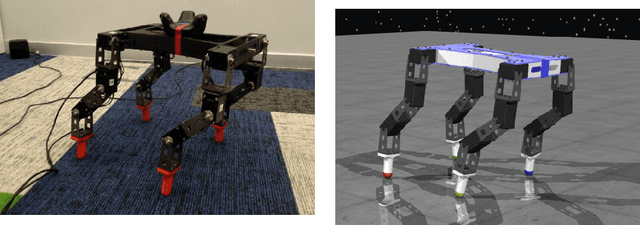
Animals have remarkable abilities to adapt locomotion to different terrains and tasks. However, robots trained by means of reinforcement learning are typically able to solve only a single task and a transferred policy is usually inferior to that trained from scratch. In this work, we demonstrate that meta-reinforcement learning can be used to successfully train a robot capable to solve a wide range of locomotion tasks. The performance of the meta-trained robot is similar to that of a robot that is trained on a single task.