 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTest-Time Adaptation for Height Completion via Self-Supervised ViT Features and Monocular Foundation Models
Apr 02, 2026Accurate digital surface models (DSMs) are essential for many geospatial applications, including urban monitoring, environmental analyses, infrastructure management, and change detection. However, large-scale DSMs frequently contain incomplete or outdated regions due to acquisition limitations, reconstruction artifacts, or changes in the built environment. Traditional height completion approaches primarily rely on spatial interpolation or which assume spatial continuity and therefore fail when objects are missing. Recent learning-based approaches improve reconstruction quality but typically require supervised training on sensor-specific datasets, limiting their generalization across domains and sensing conditions. We propose Prior2DSM, a training-free framework for metric DSM completion that operates entirely at test time by leveraging foundation models. Unlike previous height completion approaches that require task-specific training, the proposed method combines self-supervised Vision Transformer (ViT) features from DINOv3 with monocular depth foundation models to propagate metric information from incomplete height priors through semantic feature-space correspondence. Test-time adaptation (TTA) is performed using parameter-efficient low-rank adaptation (LoRA) together with a lightweight multilayer perceptron (MLP), which predicts spatially varying scale and shift parameters to convert relative depth estimates into metric heights. Experiments demonstrate consistent improvements over interpolation based methods, prior-based rescaling height approaches, and state-of-the-art monocular depth estimation models. Prior2DSM reduces reconstruction error while preserving structural fidelity, achieving up to a 46% reduction in RMSE compared to linear fitting of MDE, and further enables DSM updating and coupled RGB-DSM generation.
SinkSAM: A Monocular Depth-Guided SAM Framework for Automatic Sinkhole Segmentation
Oct 02, 2024



Soil sinkholes significantly influence soil degradation, but their irregular shapes, along with interference from shadow and vegetation, make it challenging to accurately quantify their properties using remotely sensed data. We present a novel framework for sinkhole segmentation that combines traditional topographic computations of closed depressions with the newly developed prompt-based Segment Anything Model (SAM). Within this framework, termed SinkSAM, we highlight four key improvements: (1) The integration of topographic computations with SAM enables pixel-level refinement of sinkhole boundaries segmentation; (2) A coherent mathematical prompting strategy, based on closed depressions, addresses the limitations of purely learning-based models (CNNs) in detecting and segmenting undefined sinkhole features, while improving generalization to new, unseen regions; (3) Using Depth Anything V2 monocular depth for automatic prompts eliminates photogrammetric biases, enabling sinkhole mapping without the dependence on LiDAR data; and (4) An established sinkhole database facilitates fine-tuning of SAM, improving its zero-shot performance in sinkhole segmentation. These advancements allow the deployment of SinkSAM, in an unseen test area, in the highly variable semiarid region, achieving an intersection-over-union (IoU) of 40.27\% and surpassing previous results. This paper also presents the first SAM implementation for sinkhole segmentation and demonstrates the robustness of SinkSAM in extracting sinkhole maps using a single RGB image.
Prompt-Based Segmentation at Multiple Resolutions and Lighting Conditions using Segment Anything Model 2
Aug 15, 2024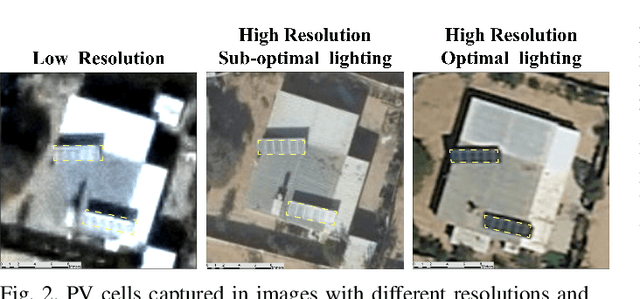

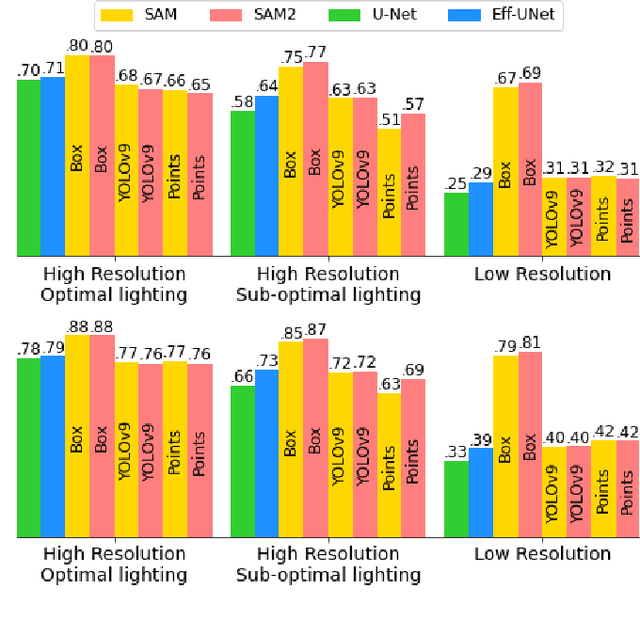

This paper provides insight into the effectiveness of zero-shot, prompt-based, Segment Anything Model (SAM), and its updated version, SAM 2, and the non-promptable, conventional convolutional network (CNN), in segmenting solar panels, in RGB aerial imagery, across lighting conditions, spatial resolutions, and prompt strategies. SAM 2 demonstrates improvements over SAM, particularly in sub-optimal lighting conditions when prompted by points. Both SAMs, prompted by user-box, outperformed CNN, in all scenarios. Additionally, YOLOv9 prompting outperformed user points prompting. In high-resolution imagery, both in optimal and sub-optimal lighting conditions, Eff-UNet outperformed both SAM models prompted by YOLOv9 boxes, positioning Eff-UNet as the appropriate model for automatic segmentation in high-resolution data. In low-resolution data, user box prompts were found crucial to achieve a reasonable performance. This paper provides details on strengths and limitations of each model and outlines robustness of user prompted image segmentation models in inconsistent resolution and lighting conditions of remotely sensed data.