 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMINDGAMES: A Live Arena for Evaluating Social and Strategic Reasoning in Multi-Agent LLMs
May 28, 2026Large language models (LLMs) are increasingly deployed as interactive agents, yet their capacity for social and strategic reasoning over extended interaction remains poorly understood. Existing evaluations rely on static vignettes or single-game benchmarks that cannot capture the sustained, multi-faceted reasoning that real-world multi-agent settings demand. We introduce Mindgames, a multi-game arena and evaluation platform for LLM agents that operationalizes complementary reasoning demands relevant to ``theory of mind'': belief attribution under hidden information, opponent modeling through repeated strategic interaction, cooperative inference under knowledge asymmetries, and sustained deception in social deduction. Built on TextArena, Mindgames provides a unified interaction interface, TrueSkill-based rating, and full trajectory logging across four game environments. We instantiate Mindgames through a 2025 competition cycle hosted at a major AI conference, which assessed 944 submitted agents from 76 teams across four games: Colonel Blotto, Iterated Prisoner's Dilemma, Codenames, and Secret Mafia. Our analysis surfaces both agent-level and evaluation-level limitations: brittle rule adherence remains a major bottleneck, top-performing systems repeatedly rely on explicit structural scaffolding, and leaderboard validity differs sharply across environments. In particular, failure-heavy environments can reward robustness to opponent errors as much as strategic ability, with Secret Mafia exhibiting a pronounced error-survival confound in this cycle. We release a dataset of 29,571 multi-agent games with turn-level observations, actions, and rewards, together with MG-Ref, a deterministic offline tournament protocol that scores new agents against a frozen reference pool of top-ranked, low-error Stage~II submissions under the same error-attribution lens used in this analysis.
Autonomous UAV for Building Monitoring, Detection and Localisation of Faults
Nov 13, 2021

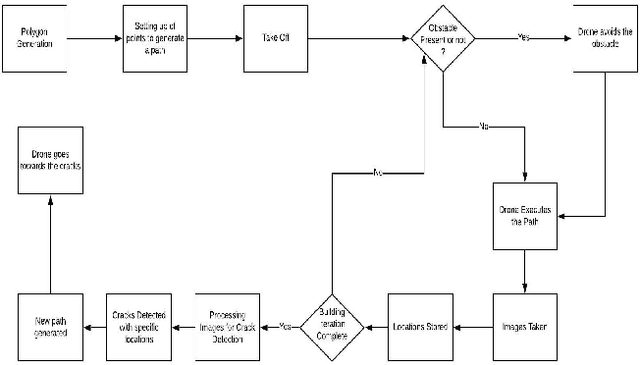

Collapsing of structural buildings has been sighted commonly and the presence of potential faults has proved to be damaging to the buildings, resulting in accidents. It is essential to continuously monitor any building for faults where human access is restricted. With UAVs (Unmanned Aerial Vehicles) emerging in the field of computer vision, monitoring any building and detecting such faults is seen as a possibility. This paper puts forth a novel approach where an automated UAV traverses around the target building, detects any potential faults in the building, and localizes the faults. With the dimensions of the building provided, a path around the building is generated. The images captured by the onboard camera of the UAV are passed through a neural network system to confirm the presence of faults. Once a fault is detected, the UAV maneuvers itself to the corresponding position where the crack is detected. The simulation is done with ROS(Robot Operating System) using the AirSim environment which initializes ROS Wrappers and provides an integrated interface of ROS and AirSim to work with, The UAV is simulated in the same.