 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Navigation and Dynamic Target Tracking for Autonomous Underwater Proximity Operations
Aug 23, 2025Estimating a target's 6-DoF motion in underwater proximity operations is difficult because the chaser lacks target-side proprioception and the available relative observations are sparse, noisy, and often partial (e.g., Ultra-Short Baseline (USBL) positions). Without a motion prior, factor-graph maximum a posteriori estimation is underconstrained: consecutive target states are weakly linked and orientation can drift. We propose a generalized constant-twist motion prior defined on the tangent space of Lie groups that enforces temporally consistent trajectories across all degrees of freedom; in SE(3) it couples translation and rotation in the body frame. We present a ternary factor and derive its closed-form Jacobians based on standard Lie group operations, enabling drop-in use for trajectories on arbitrary Lie groups. We evaluate two deployment modes: (A) an SE(3)-only representation that regularizes orientation even when only position is measured, and (B) a mode with boundary factors that switches the target representation between SE(3) and 3D position while applying the same generalized constant-twist prior across representation changes. Validation on a real-world dynamic docking scenario dataset shows consistent ego-target trajectory estimation through USBL-only and optical relative measurement segments with an improved relative tracking accuracy compared to the noisy measurements to the target. Because the construction relies on standard Lie group primitives, it is portable across state manifolds and sensing modalities.
Simultaneous Trajectory Estimation and Mapping for Autonomous Underwater Proximity Operations
Sep 15, 2023



Due to the challenges regarding the limits of their endurance and autonomous capabilities, underwater docking for autonomous underwater vehicles (AUVs) has become a topic of interest for many academic and commercial applications. Herein, we take on the problem of state estimation during an autonomous underwater docking mission. Docking operations typically involve only two actors, a chaser and a target. We leverage the similarities to proximity operations (prox-ops) from spacecraft robotic missions to frame the diverse docking scenarios with a set of phases the chaser undergoes on the way to its target. We use factor graphs to generalize the underlying estimation problem for arbitrary underwater prox-ops. To showcase our framework, we use this factor graph approach to model an underwater homing scenario with an active target as a Simultaneous Localization and Mapping problem. Using basic AUV navigation sensors, relative Ultra-short Baseline measurements, and the assumption of constant dynamics for the target, we derive factors that constrain the chaser's state and the position and trajectory of the target. We detail our front- and back-end software implementation using open-source software and libraries, and verify its performance with both simulated and field experiments. Obtained results show an overall increase in performance against the unprocessed measurements, regardless of the presence of an adversarial target whose dynamics void the modeled assumptions. However, challenges with unmodeled noise parameters and stringent target motion assumptions shed light on limitations that must be addressed to enhance the accuracy and consistency of the proposed approach.
Resilient Sensor Architecture Design and Tradespace Analysis for Autonomous Vehicle Localization and Mapping
Jul 19, 2019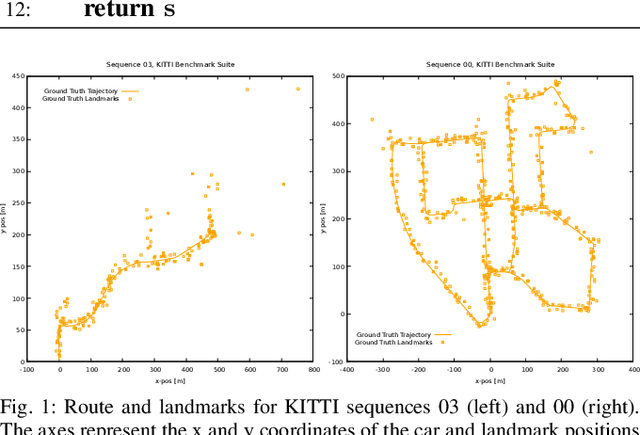
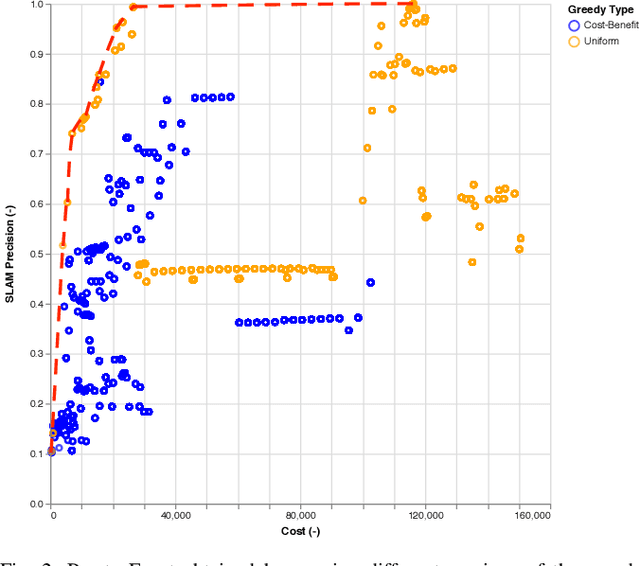
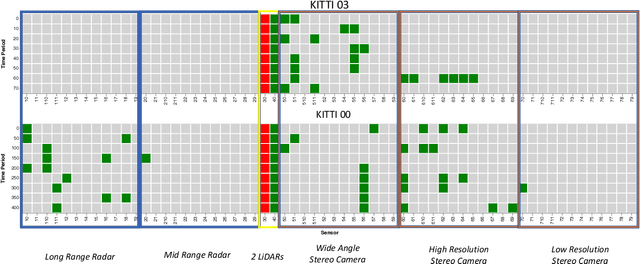
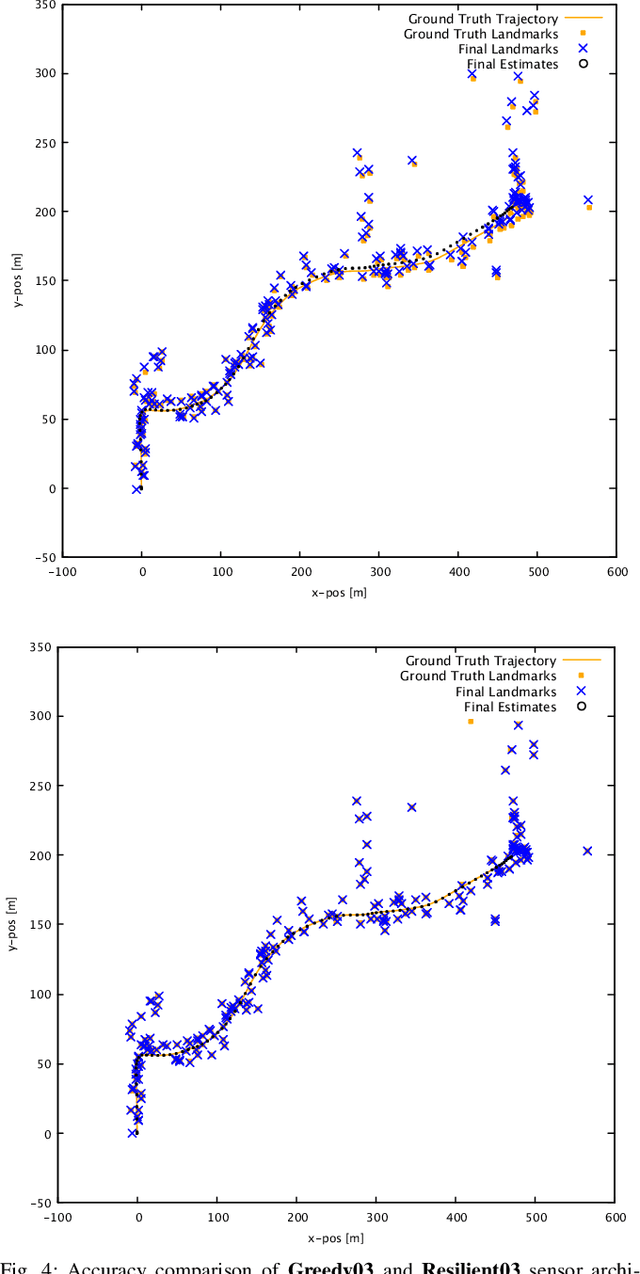
As autonomous cars are rolled out into new environments, their ability to solve the simultaneous localization and mapping (SLAM) problem becomes critical. In order to tackle this problem, autonomous vehicles rely on sensor suites that provide them with information about their operating environment. When large scale production is taken into consideration, a trade-off between an acceptable sensor suite cost and its resulting performance characteristics arises. Furthermore, guaranteeing the system's performance requires a resilient sensor network design. This work seeks to address such trade-offs by introducing a method that takes into account the performance, cost, and resiliency of distinct sensor selections. As a result, this method is able to offer sensor combination recommendations based on the vehicle's operating environment. It is found that the structure of the environment influences sensor placement, and that the design of a resilient sensor network involves careful consideration of both environmental attributes such as landmark density and location, as well as the available types of complimentary sensors. Demonstration of the proposed approach is shown by evaluating it using sequences from the KITTI Benchmark Suite.