 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Flow Matching for Continuous Anomaly Detection in Autonomous Driving on a Manifold-Aware Spectral Space
Feb 19, 2026Safety validation for Level 4 autonomous vehicles (AVs) is currently bottlenecked by the inability to scale the detection of rare, high-risk long-tail scenarios using traditional rule-based heuristics. We present Deep-Flow, an unsupervised framework for safety-critical anomaly detection that utilizes Optimal Transport Conditional Flow Matching (OT-CFM) to characterize the continuous probability density of expert human driving behavior. Unlike standard generative approaches that operate in unstable, high-dimensional coordinate spaces, Deep-Flow constrains the generative process to a low-rank spectral manifold via a Principal Component Analysis (PCA) bottleneck. This ensures kinematic smoothness by design and enables the computation of the exact Jacobian trace for numerically stable, deterministic log-likelihood estimation. To resolve multi-modal ambiguity at complex junctions, we utilize an Early Fusion Transformer encoder with lane-aware goal conditioning, featuring a direct skip-connection to the flow head to maintain intent-integrity throughout the network. We introduce a kinematic complexity weighting scheme that prioritizes high-energy maneuvers (quantified via path tortuosity and jerk) during the simulation-free training process. Evaluated on the Waymo Open Motion Dataset (WOMD), our framework achieves an AUC-ROC of 0.766 against a heuristic golden set of safety-critical events. More significantly, our analysis reveals a fundamental distinction between kinematic danger and semantic non-compliance. Deep-Flow identifies a critical predictability gap by surfacing out-of-distribution behaviors, such as lane-boundary violations and non-normative junction maneuvers, that traditional safety filters overlook. This work provides a mathematically rigorous foundation for defining statistical safety gates, enabling objective, data-driven validation for the safe deployment of autonomous fleets.
Semantic-Drive: Democratizing Long-Tail Data Curation via Open-Vocabulary Grounding and Neuro-Symbolic VLM Consensus
Dec 16, 2025The development of robust Autonomous Vehicles (AVs) is bottlenecked by the scarcity of "Long-Tail" training data. While fleets collect petabytes of video logs, identifying rare safety-critical events (e.g., erratic jaywalking, construction diversions) remains a manual, cost-prohibitive process. Existing solutions rely on coarse metadata search, which lacks precision, or cloud-based VLMs, which are privacy-invasive and expensive. We introduce Semantic-Drive, a local-first, neuro-symbolic framework for semantic data mining. Our approach decouples perception into two stages: (1) Symbolic Grounding via a real-time open-vocabulary detector (YOLOE) to anchor attention, and (2) Cognitive Analysis via a Reasoning VLM that performs forensic scene analysis. To mitigate hallucination, we implement a "System 2" inference-time alignment strategy, utilizing a multi-model "Judge-Scout" consensus mechanism. Benchmarked on the nuScenes dataset against the Waymo Open Dataset (WOD-E2E) taxonomy, Semantic-Drive achieves a Recall of 0.966 (vs. 0.475 for CLIP) and reduces Risk Assessment Error by 40% ccompared to the best single scout models. The system runs entirely on consumer hardware (NVIDIA RTX 3090), offering a privacy-preserving alternative to the cloud.
Fast 3D Surrogate Modeling for Data Center Thermal Management
Nov 13, 2025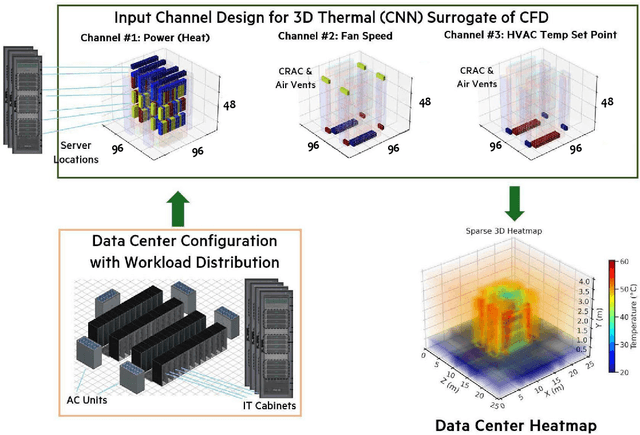
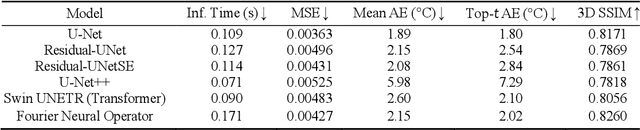
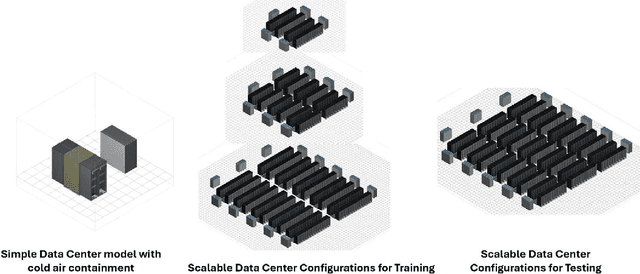

Reducing energy consumption and carbon emissions in data centers by enabling real-time temperature prediction is critical for sustainability and operational efficiency. Achieving this requires accurate modeling of the 3D temperature field to capture airflow dynamics and thermal interactions under varying operating conditions. Traditional thermal CFD solvers, while accurate, are computationally expensive and require expert-crafted meshes and boundary conditions, making them impractical for real-time use. To address these limitations, we develop a vision-based surrogate modeling framework that operates directly on a 3D voxelized representation of the data center, incorporating server workloads, fan speeds, and HVAC temperature set points. We evaluate multiple architectures, including 3D CNN U-Net variants, a 3D Fourier Neural Operator, and 3D vision transformers, to map these thermal inputs to high-fidelity heat maps. Our results show that the surrogate models generalize across data center configurations and achieve up to 20,000x speedup (hundreds of milliseconds vs. hours). This fast and accurate estimation of hot spots and temperature distribution enables real-time cooling control and workload redistribution, leading to substantial energy savings (7\%) and reduced carbon footprint.
Efficient Virtuoso: A Latent Diffusion Transformer Model for Goal-Conditioned Trajectory Planning
Sep 03, 2025The ability to generate a diverse and plausible distribution of future trajectories is a critical capability for autonomous vehicle planning systems. While recent generative models have shown promise, achieving high fidelity, computational efficiency, and precise control remains a significant challenge. In this paper, we present the \textbf{Efficient Virtuoso}, a conditional latent diffusion model for goal-conditioned trajectory planning. Our approach introduces a novel two-stage normalization pipeline that first scales trajectories to preserve their geometric aspect ratio and then normalizes the resulting PCA latent space to ensure a stable training target. The denoising process is performed efficiently in this low-dimensional latent space by a simple MLP denoiser, which is conditioned on a rich scene context fused by a powerful Transformer-based StateEncoder. We demonstrate that our method achieves state-of-the-art performance on the Waymo Open Motion Dataset, reaching a \textbf{minADE of 0.25}. Furthermore, through a rigorous ablation study on goal representation, we provide a key insight: while a single endpoint goal can resolve strategic ambiguity, a richer, multi-step sparse route is essential for enabling the precise, high-fidelity tactical execution that mirrors nuanced human driving behavior.
From Imitation to Optimization: A Comparative Study of Offline Learning for Autonomous Driving
Aug 09, 2025Learning robust driving policies from large-scale, real-world datasets is a central challenge in autonomous driving, as online data collection is often unsafe and impractical. While Behavioral Cloning (BC) offers a straightforward approach to imitation learning, policies trained with BC are notoriously brittle and suffer from compounding errors in closed-loop execution. This work presents a comprehensive pipeline and a comparative study to address this limitation. We first develop a series of increasingly sophisticated BC baselines, culminating in a Transformer-based model that operates on a structured, entity-centric state representation. While this model achieves low imitation loss, we show that it still fails in long-horizon simulations. We then demonstrate that by applying a state-of-the-art Offline Reinforcement Learning algorithm, Conservative Q-Learning (CQL), to the same data and architecture, we can learn a significantly more robust policy. Using a carefully engineered reward function, the CQL agent learns a conservative value function that enables it to recover from minor errors and avoid out-of-distribution states. In a large-scale evaluation on 1,000 unseen scenarios from the Waymo Open Motion Dataset, our final CQL agent achieves a 3.2x higher success rate and a 7.4x lower collision rate than the strongest BC baseline, proving that an offline RL approach is critical for learning robust, long-horizon driving policies from static expert data.