 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Interactive Control Approach to 3D Shape Reconstruction
Oct 07, 2019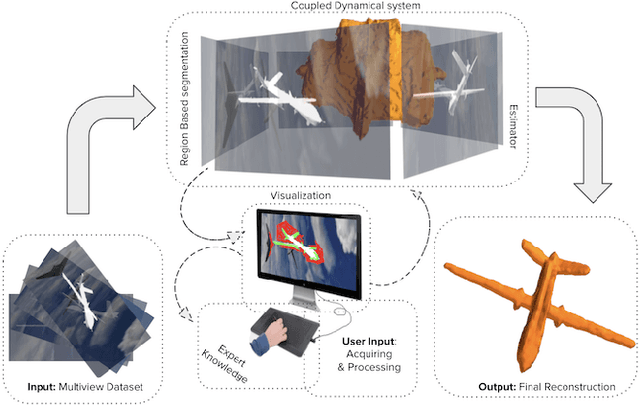
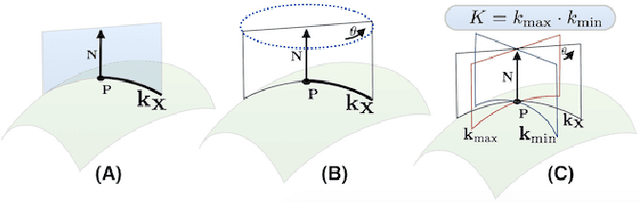
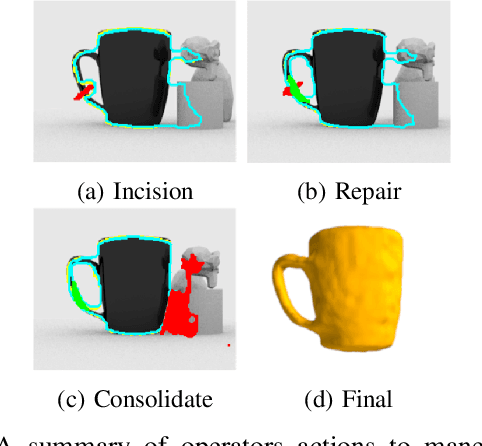
The ability to accurately reconstruct the 3D facets of a scene is one of the key problems in robotic vision. However, even with recent advances with machine learning, there is no high-fidelity universal 3D reconstruction method for this optimization problem as schemes often cater to specific image modalities and are often biased by scene abnormalities. Simply put, there always remains an information gap due to the dynamic nature of real-world scenarios. To this end, we demonstrate a feedback control framework which invokes operator inputs (also prone to errors) in order to augment existing reconstruction schemes. For proof-of-concept, we choose a classical region-based stereoscopic reconstruction approach and show how an ill-posed model can be augmented with operator input to be much more robust to scene artifacts. We provide necessary conditions for stability via Lyapunov analysis and perhaps more importantly, we show that the stability depends on a notion of absolute curvature. Mathematically, this aligns with previous work that has shown Ricci curvature as proxy for functional robustness of dynamical networked systems. We conclude with results that show how our method can improve standalone reconstruction schemes.
Accelerated Optimization in the PDE Framework: Formulations for the Manifold of Diffeomorphisms
May 23, 2018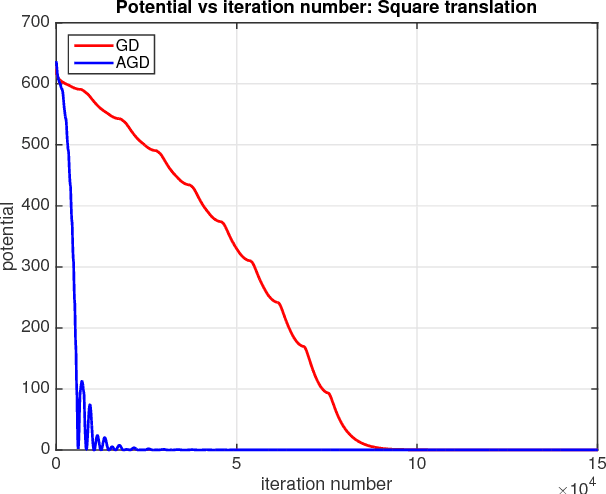
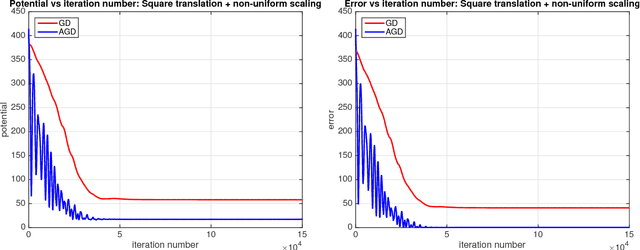
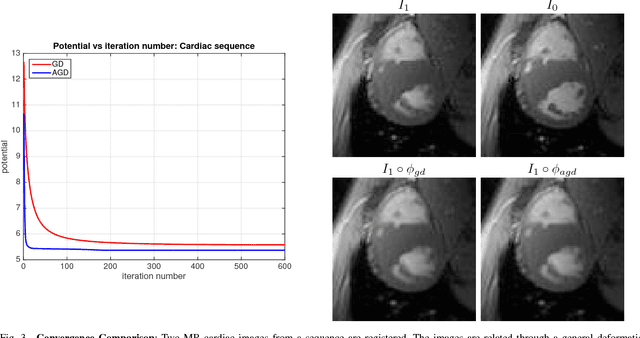
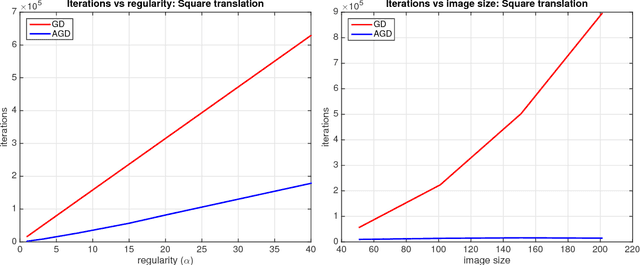
We consider the problem of optimization of cost functionals on the infinite-dimensional manifold of diffeomorphisms. We present a new class of optimization methods, valid for any optimization problem setup on the space of diffeomorphisms by generalizing Nesterov accelerated optimization to the manifold of diffeomorphisms. While our framework is general for infinite dimensional manifolds, we specifically treat the case of diffeomorphisms, motivated by optical flow problems in computer vision. This is accomplished by building on a recent variational approach to a general class of accelerated optimization methods by Wibisono, Wilson and Jordan, which applies in finite dimensions. We generalize that approach to infinite dimensional manifolds. We derive the surprisingly simple continuum evolution equations, which are partial differential equations, for accelerated gradient descent, and relate it to simple mechanical principles from fluid mechanics. Our approach has natural connections to the optimal mass transport problem. This is because one can think of our approach as an evolution of an infinite number of particles endowed with mass (represented with a mass density) that moves in an energy landscape. The mass evolves with the optimization variable, and endows the particles with dynamics. This is different than the finite dimensional case where only a single particle moves and hence the dynamics does not depend on the mass. We derive the theory, compute the PDEs for accelerated optimization, and illustrate the behavior of these new accelerated optimization schemes.
Towards an Understanding of Neural Networks in Natural-Image Spaces
Jan 27, 2018
Two major uncertainties, dataset bias and perturbation, prevail in state-of-the-art AI algorithms with deep neural networks. In this paper, we present an intuitive explanation for these issues as well as an interpretation of the performance of deep networks in a natural-image space. The explanation consists of two parts: the philosophy of neural networks and a hypothetic model of natural-image spaces. Following the explanation, we slightly improve the accuracy of a CIFAR-10 classifier by introducing an additional "random-noise" category during training. We hope this paper will stimulate discussion in the community regarding the topological and geometric properties of natural-image spaces to which deep networks are applied.
Accelerated Optimization in the PDE Framework: Formulations for the Active Contour Case
Nov 27, 2017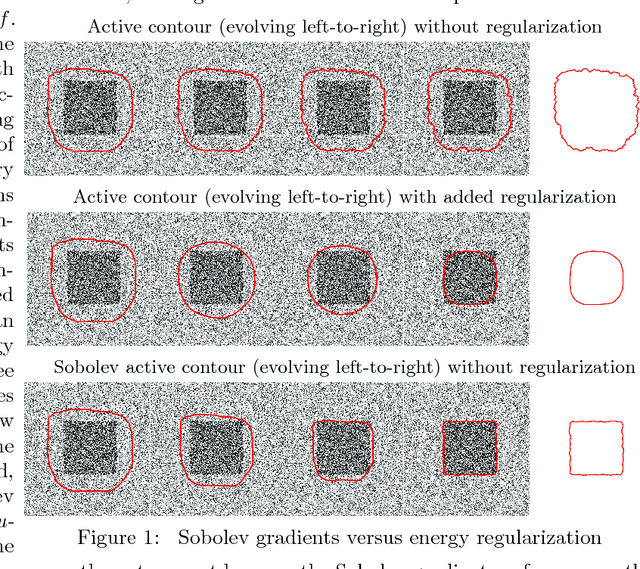
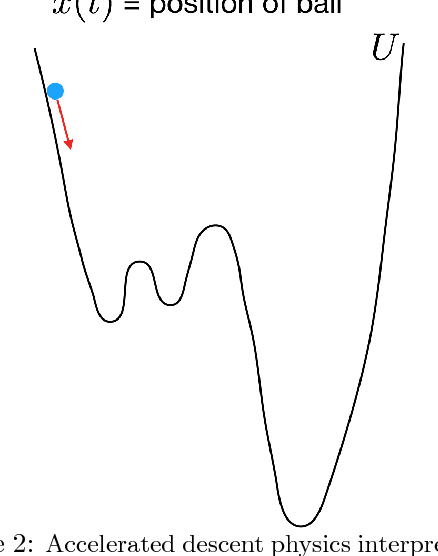
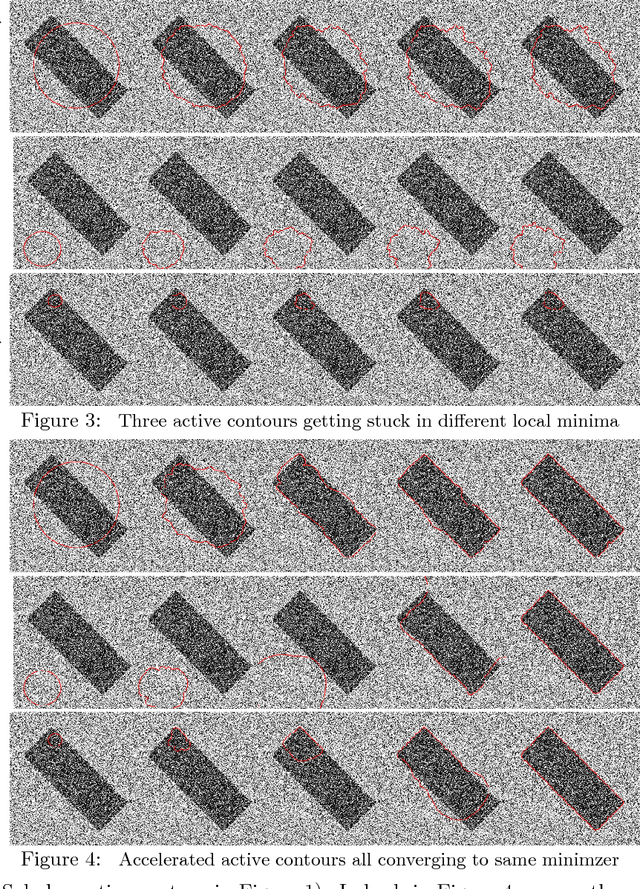
Following the seminal work of Nesterov, accelerated optimization methods have been used to powerfully boost the performance of first-order, gradient-based parameter estimation in scenarios where second-order optimization strategies are either inapplicable or impractical. Not only does accelerated gradient descent converge considerably faster than traditional gradient descent, but it also performs a more robust local search of the parameter space by initially overshooting and then oscillating back as it settles into a final configuration, thereby selecting only local minimizers with a basis of attraction large enough to contain the initial overshoot. This behavior has made accelerated and stochastic gradient search methods particularly popular within the machine learning community. In their recent PNAS 2016 paper, Wibisono, Wilson, and Jordan demonstrate how a broad class of accelerated schemes can be cast in a variational framework formulated around the Bregman divergence, leading to continuum limit ODE's. We show how their formulation may be further extended to infinite dimension manifolds (starting here with the geometric space of curves and surfaces) by substituting the Bregman divergence with inner products on the tangent space and explicitly introducing a distributed mass model which evolves in conjunction with the object of interest during the optimization process. The co-evolving mass model, which is introduced purely for the sake of endowing the optimization with helpful dynamics, also links the resulting class of accelerated PDE based optimization schemes to fluid dynamical formulations of optimal mass transport.
A compact formula for the derivative of a 3-D rotation in exponential coordinates
Aug 08, 2014We present a compact formula for the derivative of a 3-D rotation matrix with respect to its exponential coordinates. A geometric interpretation of the resulting expression is provided, as well as its agreement with other less-compact but better-known formulas. To the best of our knowledge, this simpler formula does not appear anywhere in the literature. We hope by providing this more compact expression to alleviate the common pressure to reluctantly resort to alternative representations in various computational applications simply as a means to avoid the complexity of differential analysis in exponential coordinates.
* 6 pages
Tracking via Motion Estimation with Physically Motivated Inter-Region Constraints
Feb 06, 2014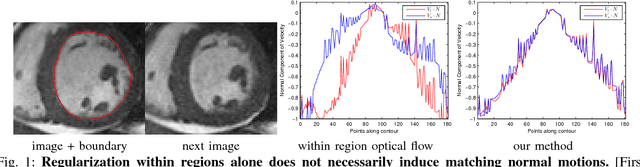
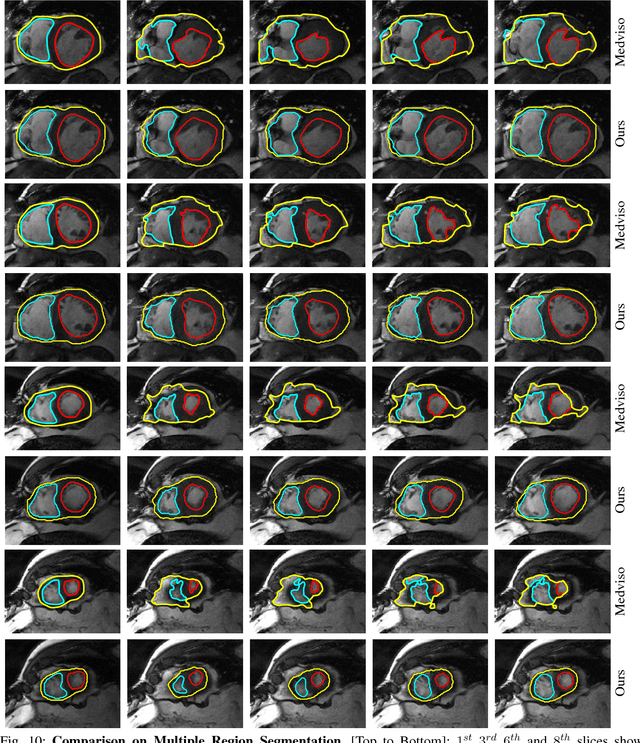
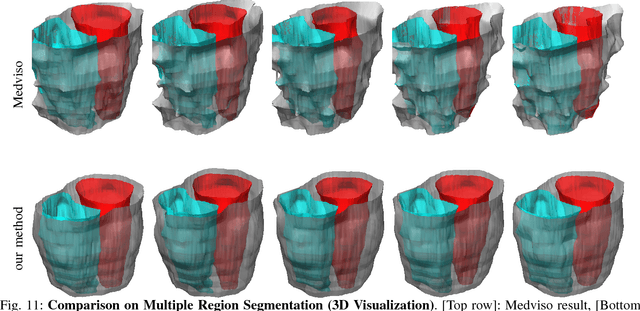
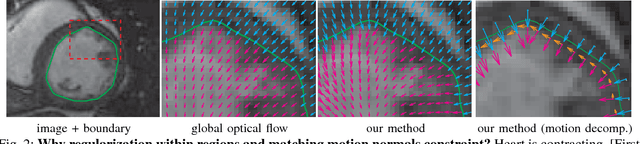
In this paper, we propose a method for tracking structures (e.g., ventricles and myocardium) in cardiac images (e.g., magnetic resonance) by propagating forward in time a previous estimate of the structures via a new deformation estimation scheme that is motivated by physical constraints of fluid motion. The method employs within structure motion estimation (so that differing motions among different structures are not mixed) while simultaneously satisfying the physical constraint in fluid motion that at the interface between a fluid and a medium, the normal component of the fluid's motion must match the normal component of the motion of the medium. We show how to estimate the motion according to the previous considerations in a variational framework, and in particular, show that these conditions lead to PDEs with boundary conditions at the interface that resemble Robin boundary conditions and induce coupling between structures. We illustrate the use of this motion estimation scheme in propagating a segmentation across frames and show that it leads to more accurate segmentation than traditional motion estimation that does not make use of physical constraints. Further, the method is naturally suited to interactive segmentation methods, which are prominently used in practice in commercial applications for cardiac analysis, where typically a segmentation from the previous frame is used to predict a segmentation in the next frame. We show that our propagation scheme reduces the amount of user interaction by predicting more accurate segmentations than commonly used and recent interactive commercial techniques.