 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkill-informed Data-driven Haptic Nudges for High-dimensional Human Motor Learning
Mar 13, 2026In this work, we propose a data-driven skill-informed framework to design optimal haptic nudge feedback for high-dimensional novel motor learning tasks. We first model the stochastic dynamics of human motor learning using an Input-Output Hidden Markov Model (IOHMM), which explicitly decouples latent skill evolution from observable kinematic emissions. Leveraging this predictive model, we formulate the haptic nudge feedback design problem as a Partially Observable Markov Decision Process (POMDP). This allows us to derive an optimal nudging policy that minimizes long-term performance cost, implicitly guiding the learner toward robust regions of the skill space. We validated our approach through a human-subject study ($N=30$) using a high-dimensional hand-exoskeleton task. Results demonstrate that participants trained with the POMDP-derived policy exhibited significantly accelerated task performance compared to groups receiving heuristic-based feedback or no feedback. Furthermore, synergy analysis revealed that the POMDP group discovered efficient low-dimensional motor representations more rapidly.
Towards Modeling Human Motor Learning Dynamics in High-Dimensional Spaces
Feb 06, 2022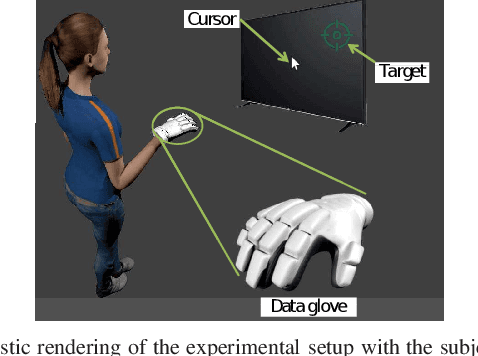
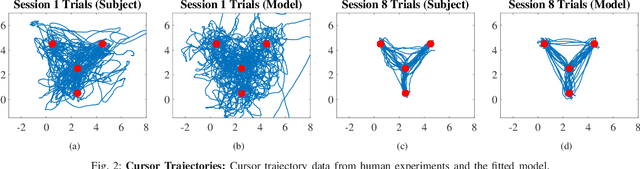
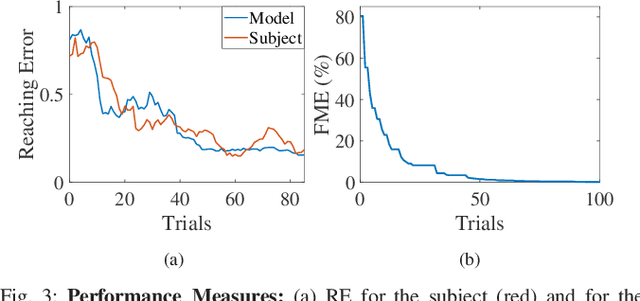
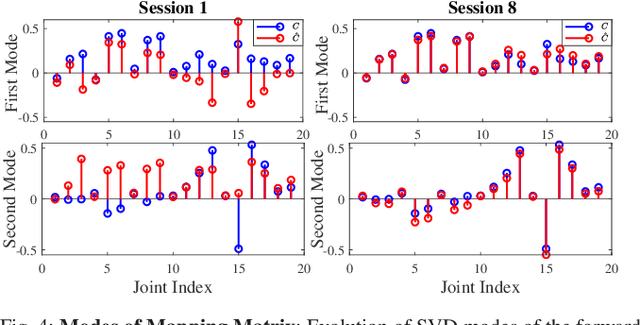
Designing effective rehabilitation strategies for upper extremities, particularly hands and fingers, warrants the need for a computational model of human motor learning. The presence of large degrees of freedom (DoFs) available in these systems makes it difficult to balance the trade-off between learning the full dexterity and accomplishing manipulation goals. The motor learning literature argues that humans use motor synergies to reduce the dimension of control space. Using the low-dimensional space spanned by these synergies, we develop a computational model based on the internal model theory of motor control. We analyze the proposed model in terms of its convergence properties and fit it to the data collected from human experiments. We compare the performance of the fitted model to the experimental data and show that it captures human motor learning behavior well.