 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJ-SGFT: Joint Spatial and Graph Fourier Domain Learning for Point Cloud Attribute Deblocking
Nov 07, 2025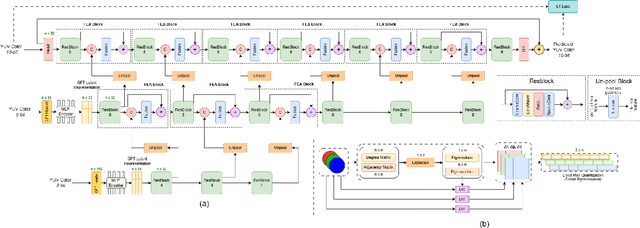
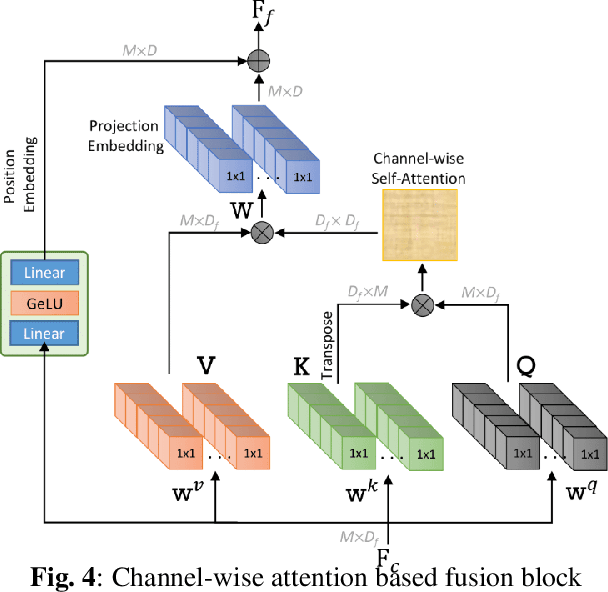
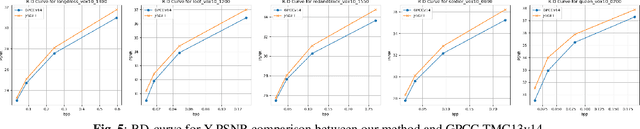
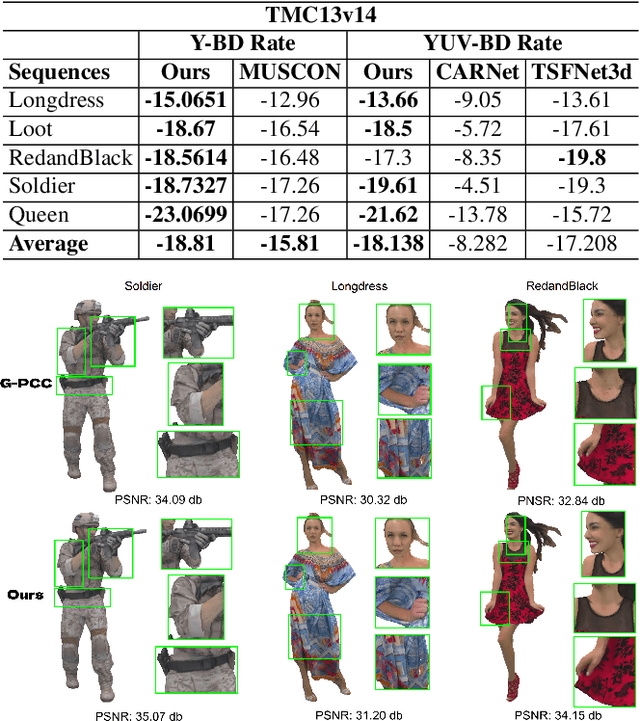
Point clouds (PC) are essential for AR/VR and autonomous driving but challenge compression schemes with their size, irregular sampling, and sparsity. MPEG's Geometry-based Point Cloud Compression (GPCC) methods successfully reduce bitrate; however, they introduce significant blocky artifacts in the reconstructed point cloud. We introduce a novel multi-scale postprocessing framework that fuses graph-Fourier latent attribute representations with sparse convolutions and channel-wise attention to efficiently deblock reconstructed point clouds. Against the GPCC TMC13v14 baseline, our approach achieves BD-rate reduction of 18.81\% in the Y channel and 18.14\% in the joint YUV on the 8iVFBv2 dataset, delivering markedly improved visual fidelity with minimal overhead.
Inter-Frame Compression for Dynamic Point Cloud Geometry Coding
Jul 25, 2022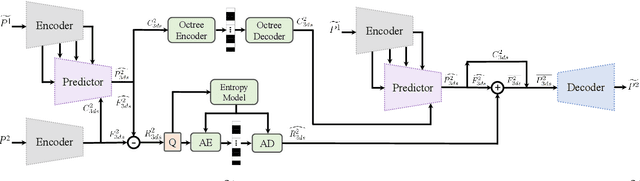
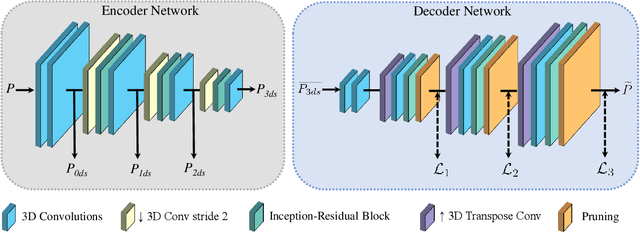
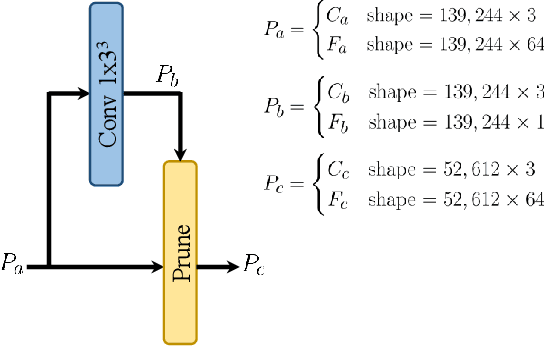
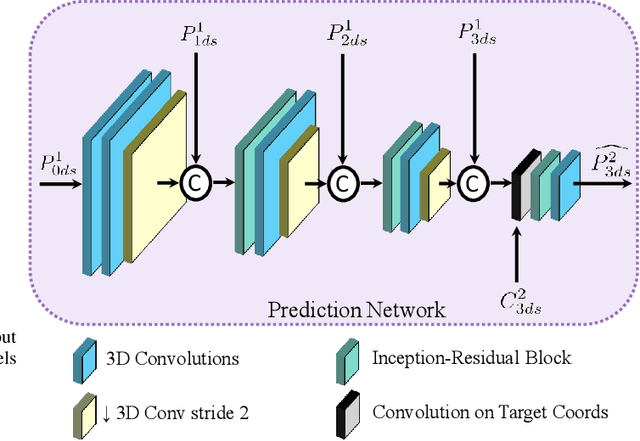
Efficient point cloud compression is essential for applications like virtual and mixed reality, autonomous driving, and cultural heritage. In this paper, we propose a deep learning-based inter-frame encoding scheme for dynamic point cloud geometry compression. We propose a lossy geometry compression scheme that predicts the latent representation of the current frame using the previous frame by employing a novel prediction network. Our proposed network utilizes sparse convolutions with hierarchical multiscale 3D feature learning to encode the current frame using the previous frame. We employ convolution on target coordinates to map the latent representation of the previous frame to the downsampled coordinates of the current frame to predict the current frame's feature embedding. Our framework transmits the residual of the predicted features and the actual features by compressing them using a learned probabilistic factorized entropy model. At the receiver, the decoder hierarchically reconstructs the current frame by progressively rescaling the feature embedding. We compared our model to the state-of-the-art Video-based Point Cloud Compression (V-PCC) and Geometry-based Point Cloud Compression (G-PCC) schemes standardized by the Moving Picture Experts Group (MPEG). Our method achieves more than 91% BD-Rate Bjontegaard Delta Rate) reduction against G-PCC, more than 62% BD-Rate reduction against V-PCC intra-frame encoding mode, and more than 52% BD-Rate savings against V-PCC P-frame-based inter-frame encoding mode using HEVC.
KitRobot: A multi-platform graphical programming IDE to program mini-robotic agents
Jan 07, 2015The analysis, design and development of a graphical programming IDE for mini-robotic agents allows novice users to program robotic agents by a graphical drag and drop interface, without knowing the syntax and semantics of the intermediate programming language. Our work started with the definition of the syntax and semantics of the intermediate programming language. The major work is the definition of grammar for this language. The use of a graphical drag and drop interface for programming mini-robots offers a user-friendly interface to novice users. The user can program graphically by drag and drop program parts without having expertise of the intermediate programming language. The IDE is highly flexible as it uses xml technology to store program objects (i.e. loops, conditions) and robot objects (i.e. sensors, actuators). Use of xml technology allows making major changes and updating the interface without modifying the underlying design and programming.