 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Manipulation Surface With Reduced Actuator Density For Heterogeneous Object Manipulation
Nov 21, 2024Object manipulation in robotics faces challenges due to diverse object shapes, sizes, and fragility. Gripper-based methods offer precision and low degrees of freedom (DOF) but the gripper limits the kind of objects to grasp. On the other hand, surface-based approaches provide flexibility for handling fragile and heterogeneous objects but require numerous actuators, increasing complexity. We propose new manipulation hardware that utilizes equally spaced linear actuators placed vertically and connected by a soft surface. In this setup, object manipulation occurs on the soft surface through coordinated movements of the surrounding actuators. This approach requires fewer actuators to cover a large manipulation area, offering a cost-effective solution with a lower DOF compared to dense actuator arrays. It also effectively handles heterogeneous objects of varying shapes and weights, even when they are significantly smaller than the distance between actuators. This method is particularly suitable for managing highly fragile objects in the food industry.
Learning Hands-On Electronics from Home: A Simulator for Fritzing
Jun 14, 2022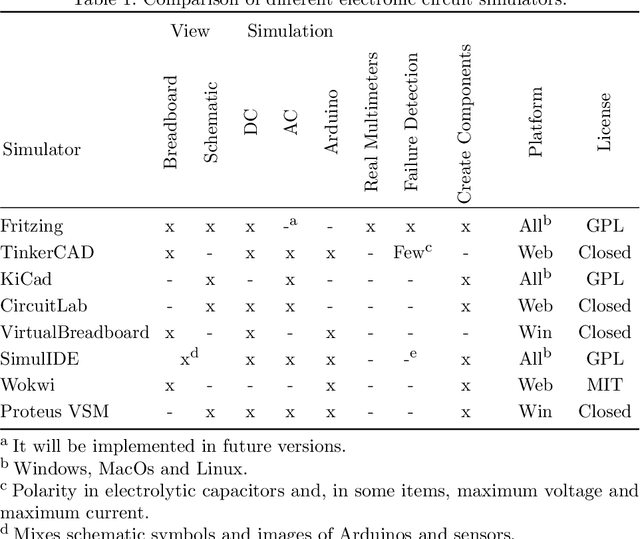



The recent pandemic has forced us to teach online, which is especially difficult for hand-on courses in robotics, like basic electronics. In this paper, I present a simulator which tries to replicate the same experience students will encounter during the exercises in the laboratory. The simulator has been developed in Fritzing, uses realistic multimeters for measuring and checks for common mistakes. Results show not only that the simulator was extremely useful during the pandemic, but also that it can supplement laboratory exercises when teaching in-classroom.