 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Testbed for Repeatable Evaluation of Ultra-Wideband Localization Performance
Mar 04, 2026Testing Ultra-Wideband (UWB) systems is challenging, as multiple devices need to coordinate over lossy links and the systems' behavior is influenced by timing, synchronization, and environmental factors. Traditional testing is often insufficient to capture these complex interactions, highlighting the need for an overarching testbed infrastructure that can manage devices, control the environment, and make measurements and test scenarios repeatable. In this work, we present a highly automated testbed architecture built on Robot Operating System Version 2, integrating device management with environmental control and measurement systems. It includes an optical reference system, a controllable Autonomous Guided Vehicle to position devices within the environment, and time synchronization via Network Time Protocol (NTP). The testbed achieves a Root Mean Squared Error of 4.8 mm for positioning repeatability and 0.493$°$ for the orientation, and our NTP-based synchronization approach achieves a timing accuracy of below 1 ms. All testbed functionality can be controlled remotely through simple Python scripts to allow automated orchestration tasks such as conducting complex measurement scenarios. We demonstrate this with a measurement campaign on UWB localization, showing how it enables repeatable, observable, and fully controlled wireless experiments.
Trustworthiness for an Ultra-Wideband Localization Service
Aug 10, 2024



Trustworthiness assessment is an essential step to assure that interdependent systems perform critical functions as anticipated, even under adverse conditions. In this paper, a holistic trustworthiness assessment framework for ultra-wideband self-localization is proposed, including attributes of reliability, security, privacy, and resilience. Our goal is to provide guidance for evaluating a system's trustworthiness based on objective evidence, so-called trustworthiness indicators. These indicators are carefully selected through the threat analysis of the particular system. Our approach guarantees that the resulting trustworthiness indicators correspond to chosen real-world threats. Moreover, experimental evaluations are conducted to demonstrate the effectiveness of the proposed method. While the framework is tailored for this specific use case, the process itself serves as a versatile template, which can be used in other applications in the domains of the Internet of Things or cyber-physical systems.
Joint Communication and Sensing: 5G NR Compliant Ranging Using the Sounding Reference Signal
Sep 15, 2022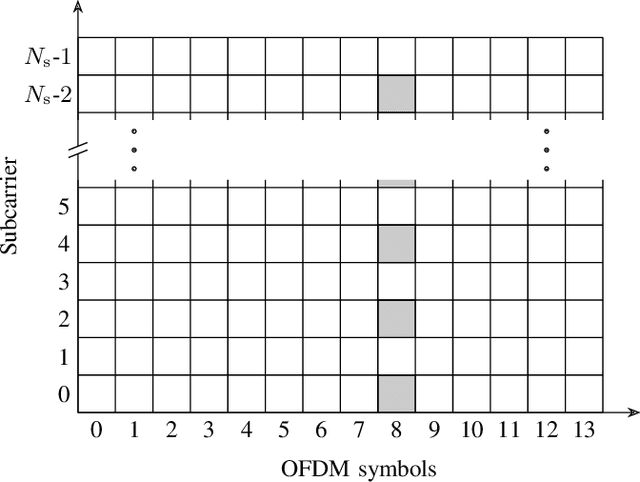
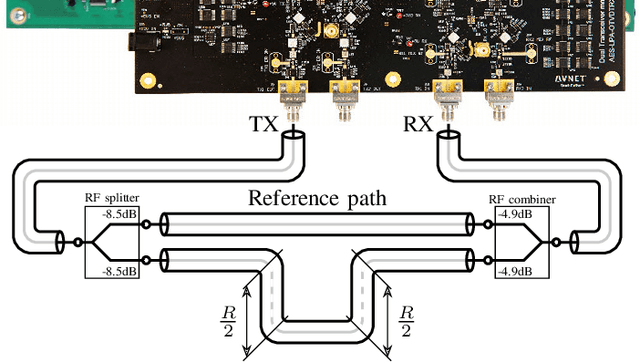
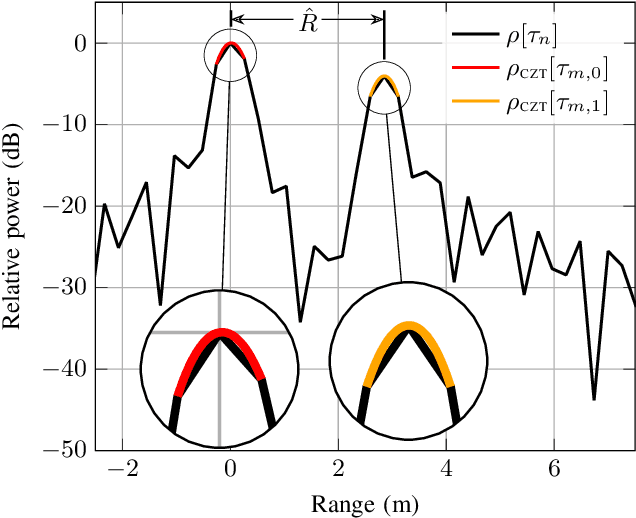
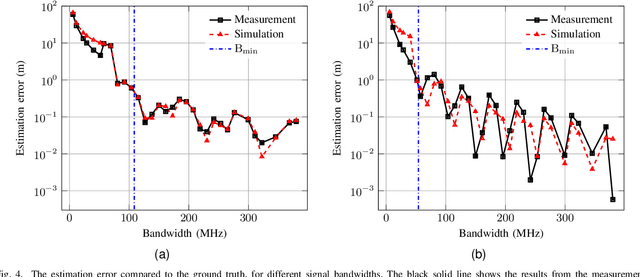
In this work, a proof of concept for 5G-compliant user-equipment side sensing is presented. It is based on orthogonal frequency division multiplexing radar-based ranging which is realized in this work by using the sounding reference signal from the 5G New Radio standard. The signal configuration and thus the corresponding waveform is generated in compliance with the existing 3rd Generation Partnership Project standard for 5G. It is an uplink physical signal and is originally intended, amongst others, for channel estimation. The used model is introduced, followed by the sounding reference signal. This leads to a first proof of concept by presenting simulation and measurement results. We show, that a range estimation error in the order of centimeters is achievable.
RSSI-Based Machine Learning with Pre- and Post-Processing for Cell-Localization in IWSNs
Apr 30, 2021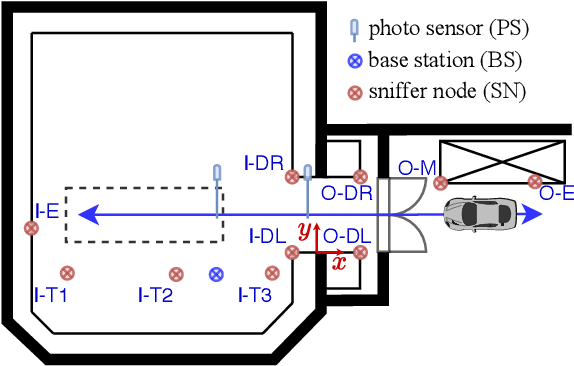
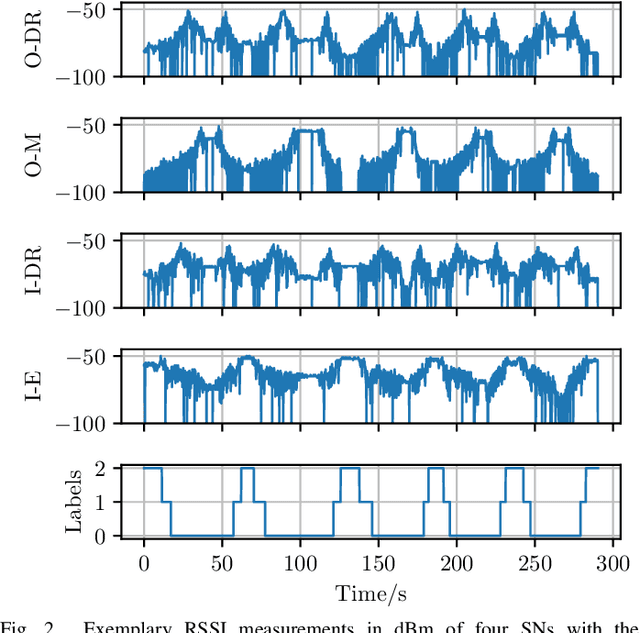
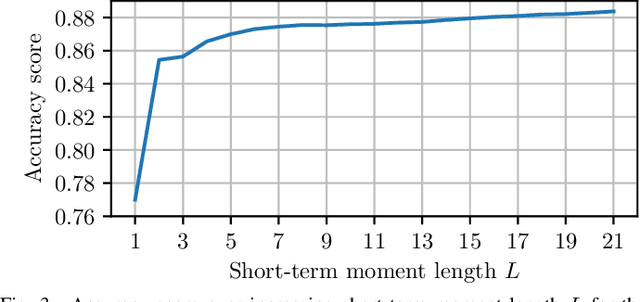
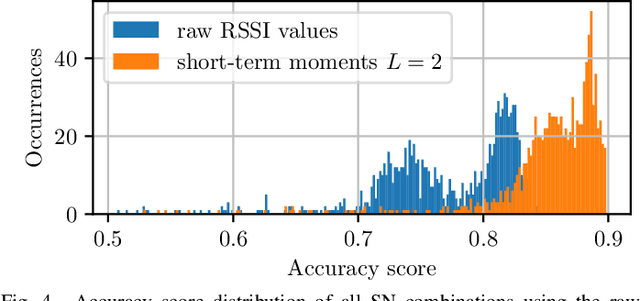
Industrial wireless sensor networks are becoming crucial for modern manufacturing. If the sensors in those networks are mobile, the position information, besides the sensor data itself, can be of high relevance. E.g. this position information can increase the trustability of a wireless sensor measurement by assuring that the sensor is not physically removed, off track, or otherwise compromised. In certain applications, localization information at cell-level, whether the sensor is inside or outside a room or cell, is sufficient. For this, localization using Received Signal Strength Indicator (RSSI) measurements is very popular since RSSI values are available in almost all existing technologies and no direct interaction with the mobile sensor node and its communication in the network is needed. For this scenario, we propose methods to improve the robustness and accuracy of common machine learning classifiers, by using features based on short-term moments and a second classification stage using Hidden Markov Models. With the data from an extensive measurement campaign, we show the applicability of our method and achieve a cell-level localization accuracy of 93.5\%.