 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource-Constrained Robotic Planning in the face of Mixed Uncertainty
May 07, 2026Robots operate under significant uncertainty, from quantifiable noise to unquantifiable unknowns, and must account for strict operational constraints, such as limited resources. In this paper, we consider the problem of synthesizing robust strategies to guide a robot's actions in fulfilling a given task, while ensuring the system never exhausts its resources. To solve this problem, we first model the robotic system as a Consumption Markov Decision Process with Set-valued Transitions(CMDPST), a unified framework modelling nondeterministic actions, quantifiable and unquantifiable uncertainty, and resource consumption. Then, we combine the CMDPST with the task specification, expressed as a Linear Temporal Logic over finite traces (LTLf ) formula. Lastly, we address the resource constrained optimal robust strategy synthesis problem, which aims to synthesize a strategy that maximizes the probability of satisfying the LTLf objective without resource exhaustion. Our solution involves two techniques: a direct unrolling-based method and a more efficient, optimized approach that leverages state-space pruning for better performance. Experiments on a warehouse transportation network show the effectiveness of the proposed solutions.
Proving Non-Inclusion of Büchi Automata based on Monte Carlo Sampling
Jul 07, 2020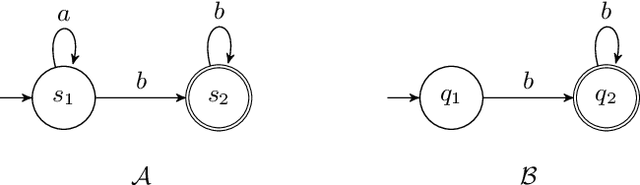
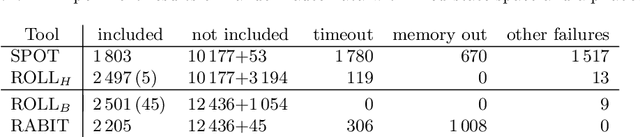
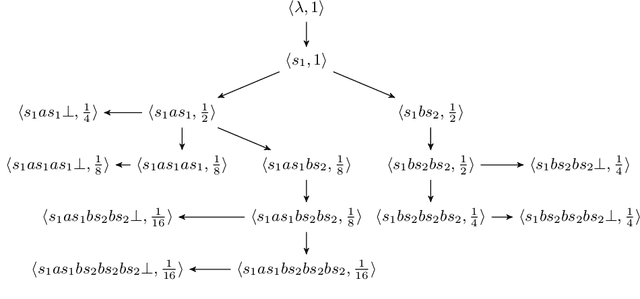
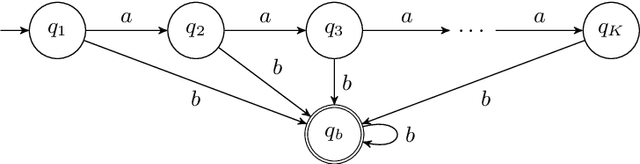
The search for a proof of correctness and the search for counterexamples (bugs) are complementary aspects of verification. In order to maximize the practical use of verification tools it is better to pursue them at the same time. While this is well-understood in the termination analysis of programs, this is not the case for the language inclusion analysis of B\"uchi automata, where research mainly focused on improving algorithms for proving language inclusion, with the search for counterexamples left to the expensive complementation operation. In this paper, we present $\mathsf{IMC}^2$, a specific algorithm for proving B\"uchi automata non-inclusion $\mathcal{L}(\mathcal{A}) \not\subseteq \mathcal{L}(\mathcal{B})$, based on Grosu and Smolka's algorithm $\mathsf{MC}^2$ developed for Monte Carlo model checking against LTL formulas. The algorithm we propose takes $M = \lceil \ln \delta / \ln (1-\epsilon) \rceil$ random lasso-shaped samples from $\mathcal{A}$ to decide whether to reject the hypothesis $\mathcal{L}(\mathcal{A}) \not\subseteq \mathcal{L}(\mathcal{B})$, for given error probability $\epsilon$ and confidence level $1 - \delta$. With such a number of samples, $\mathsf{IMC}^2$ ensures that the probability of witnessing $\mathcal{L}(\mathcal{A}) \not\subseteq \mathcal{L}(\mathcal{B})$ via further sampling is less than $\delta$, under the assumption that the probability of finding a lasso counterexample is larger than $\epsilon$. Extensive experimental evaluation shows that $\mathsf{IMC}^2$ is a fast and reliable way to find counterexamples to B\"uchi automata inclusion.