 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElastic deformation of optical coherence tomography images of diabetic macular edema for deep-learning models training: how far to go?
Jul 13, 2021



To explore the clinical validity of elastic deformation of optical coherence tomography (OCT) images for data augmentation in the development of deep-learning model for detection of diabetic macular edema (DME).
Nesti-Net: Normal Estimation for Unstructured 3D Point Clouds using Convolutional Neural Networks
Dec 03, 2018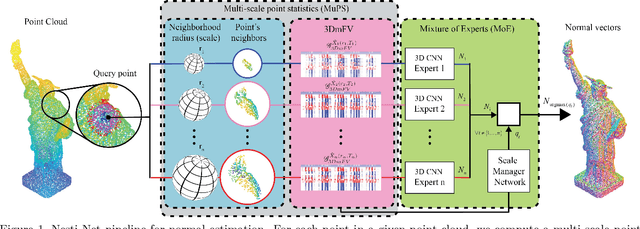
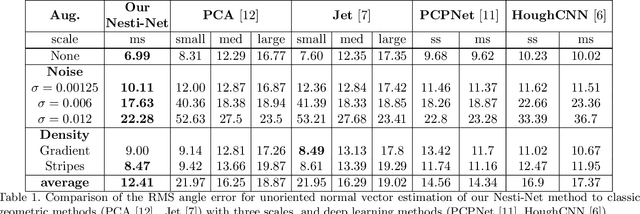
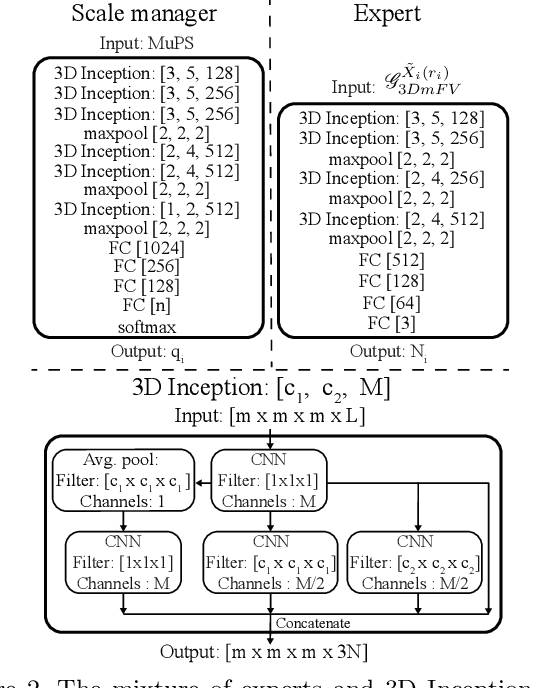
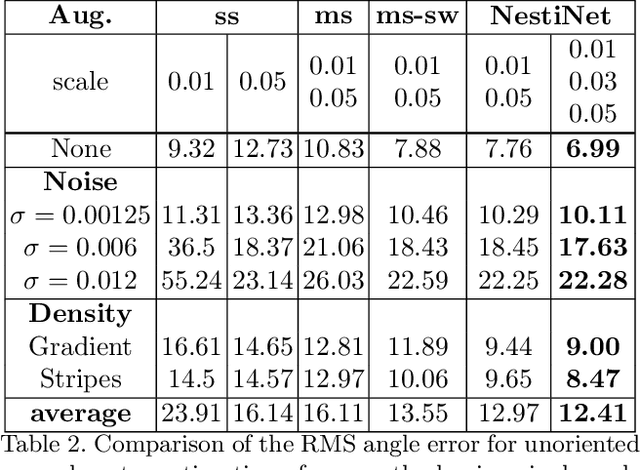
In this paper, we propose a normal estimation method for unstructured 3D point clouds. This method, called Nesti-Net, builds on a new local point cloud representation which consists of multi-scale point statistics (MuPS), estimated on a local coarse Gaussian grid. This representation is a suitable input to a CNN architecture. The normals are estimated using a mixture-of-experts (MoE) architecture, which relies on a data-driven approach for selecting the optimal scale around each point and encourages sub-network specialization. Interesting insights into the network's resource distribution are provided. The scale prediction significantly improves robustness to different noise levels, point density variations and different levels of detail. We achieve state-of-the-art results on a benchmark synthetic dataset and present qualitative results on real scanned scenes.
3D Point Cloud Classification and Segmentation using 3D Modified Fisher Vector Representation for Convolutional Neural Networks
Nov 22, 2017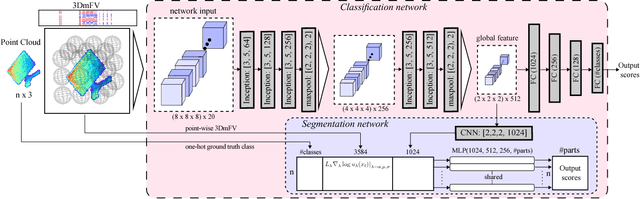
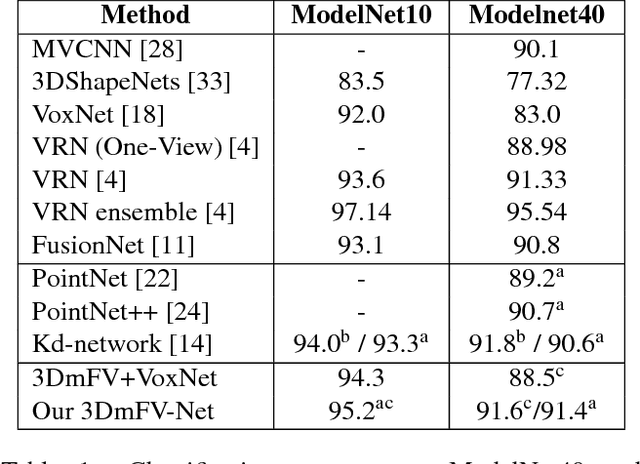

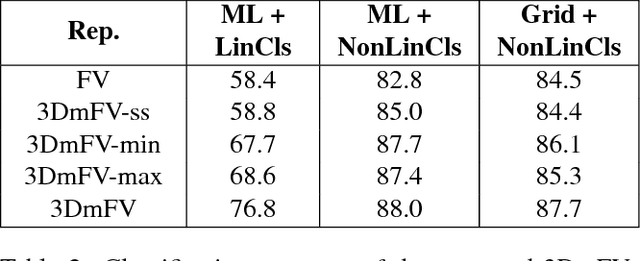
The point cloud is gaining prominence as a method for representing 3D shapes, but its irregular format poses a challenge for deep learning methods. The common solution of transforming the data into a 3D voxel grid introduces its own challenges, mainly large memory size. In this paper we propose a novel 3D point cloud representation called 3D Modified Fisher Vectors (3DmFV). Our representation is hybrid as it combines the discrete structure of a grid with continuous generalization of Fisher vectors, in a compact and computationally efficient way. Using the grid enables us to design a new CNN architecture for point cloud classification and part segmentation. In a series of experiments we demonstrate competitive performance or even better than state-of-the-art on challenging benchmark datasets.
Graph Based Over-Segmentation Methods for 3D Point Clouds
Feb 14, 2017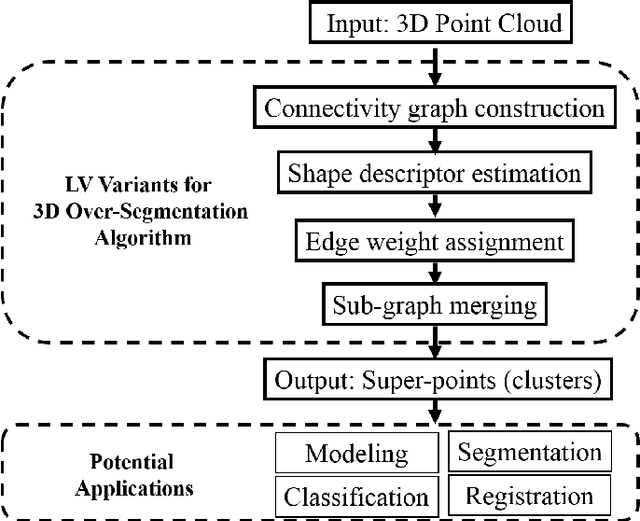
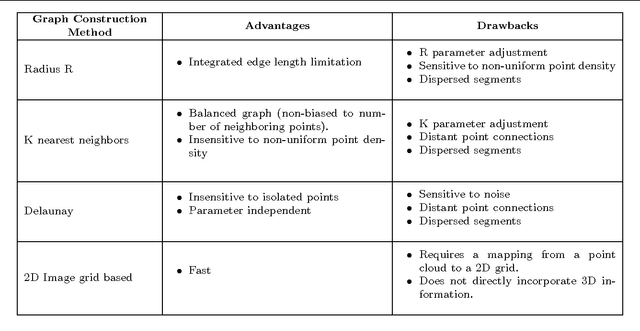
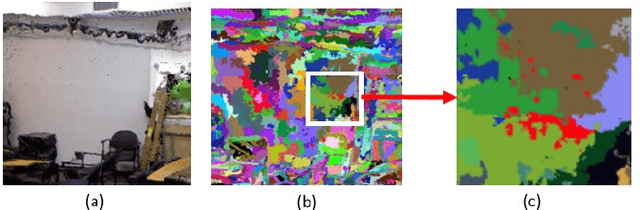
Over-segmentation, or super-pixel generation, is a common preliminary stage for many computer vision applications. New acquisition technologies enable the capturing of 3D point clouds that contain color and geometrical information. This 3D information introduces a new conceptual change that can be utilized to improve the results of over-segmentation, which uses mainly color information, and to generate clusters of points we call super-points. We consider a variety of possible 3D extensions of the Local Variation (LV) graph based over-segmentation algorithms, and compare them thoroughly. We consider different alternatives for constructing the connectivity graph, for assigning the edge weights, and for defining the merge criterion, which must now account for the geometric information and not only color. Following this evaluation, we derive a new generic algorithm for over-segmentation of 3D point clouds. We call this new algorithm Point Cloud Local Variation (PCLV). The advantages of the new over-segmentation algorithm are demonstrated on both outdoor and cluttered indoor scenes. Performance analysis of the proposed approach compared to state-of-the-art 2D and 3D over-segmentation algorithms shows significant improvement according to the common performance measures.