 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClinical Validation of Medical-based Large Language Model Chatbots on Ophthalmic Patient Queries with LLM-based Evaluation
Feb 05, 2026Domain specific large language models are increasingly used to support patient education, triage, and clinical decision making in ophthalmology, making rigorous evaluation essential to ensure safety and accuracy. This study evaluated four small medical LLMs Meerkat-7B, BioMistral-7B, OpenBioLLM-8B, and MedLLaMA3-v20 in answering ophthalmology related patient queries and assessed the feasibility of LLM based evaluation against clinician grading. In this cross sectional study, 180 ophthalmology patient queries were answered by each model, generating 2160 responses. Models were selected for parameter sizes under 10 billion to enable resource efficient deployment. Responses were evaluated by three ophthalmologists of differing seniority and by GPT-4-Turbo using the S.C.O.R.E. framework assessing safety, consensus and context, objectivity, reproducibility, and explainability, with ratings assigned on a five point Likert scale. Agreement between LLM and clinician grading was assessed using Spearman rank correlation, Kendall tau statistics, and kernel density estimate analyses. Meerkat-7B achieved the highest performance with mean scores of 3.44 from Senior Consultants, 4.08 from Consultants, and 4.18 from Residents. MedLLaMA3-v20 performed poorest, with 25.5 percent of responses containing hallucinations or clinically misleading content, including fabricated terminology. GPT-4-Turbo grading showed strong alignment with clinician assessments overall, with Spearman rho of 0.80 and Kendall tau of 0.67, though Senior Consultants graded more conservatively. Overall, medical LLMs demonstrated potential for safe ophthalmic question answering, but gaps remained in clinical depth and consensus, supporting the feasibility of LLM based evaluation for large scale benchmarking and the need for hybrid automated and clinician review frameworks to guide safe clinical deployment.
PGRID: Power Grid Reconstruction in Informal Developments Using High-Resolution Aerial Imagery
Dec 10, 2024



As of 2023, a record 117 million people have been displaced worldwide, more than double the number from a decade ago [22]. Of these, 32 million are refugees under the UNHCR mandate, with 8.7 million residing in refugee camps. A critical issue faced by these populations is the lack of access to electricity, with 80% of the 8.7 million refugees and displaced persons in camps globally relying on traditional biomass for cooking and lacking reliable power for essential tasks such as cooking and charging phones. Often, the burden of collecting firewood falls on women and children, who frequently travel up to 20 kilometers into dangerous areas, increasing their vulnerability.[7] Electricity access could significantly alleviate these challenges, but a major obstacle is the lack of accurate power grid infrastructure maps, particularly in resource-constrained environments like refugee camps, needed for energy access planning. Existing power grid maps are often outdated, incomplete, or dependent on costly, complex technologies, limiting their practicality. To address this issue, PGRID is a novel application-based approach, which utilizes high-resolution aerial imagery to detect electrical poles and segment electrical lines, creating precise power grid maps. PGRID was tested in the Turkana region of Kenya, specifically the Kakuma and Kalobeyei Camps, covering 84 km2 and housing over 200,000 residents. Our findings show that PGRID delivers high-fidelity power grid maps especially in unplanned settlements, with F1-scores of 0.71 and 0.82 for pole detection and line segmentation, respectively. This study highlights a practical application for leveraging open data and limited labels to improve power grid mapping in unplanned settlements, where the growing number of displaced persons urgently need sustainable energy infrastructure solutions.
Automating the Analysis of Public Saliency and Attitudes towards Biodiversity from Digital Media
May 02, 2024



Measuring public attitudes toward wildlife provides crucial insights into our relationship with nature and helps monitor progress toward Global Biodiversity Framework targets. Yet, conducting such assessments at a global scale is challenging. Manually curating search terms for querying news and social media is tedious, costly, and can lead to biased results. Raw news and social media data returned from queries are often cluttered with irrelevant content and syndicated articles. We aim to overcome these challenges by leveraging modern Natural Language Processing (NLP) tools. We introduce a folk taxonomy approach for improved search term generation and employ cosine similarity on Term Frequency-Inverse Document Frequency vectors to filter syndicated articles. We also introduce an extensible relevance filtering pipeline which uses unsupervised learning to reveal common topics, followed by an open-source zero-shot Large Language Model (LLM) to assign topics to news article titles, which are then used to assign relevance. Finally, we conduct sentiment, topic, and volume analyses on resulting data. We illustrate our methodology with a case study of news and X (formerly Twitter) data before and during the COVID-19 pandemic for various mammal taxa, including bats, pangolins, elephants, and gorillas. During the data collection period, up to 62% of articles including keywords pertaining to bats were deemed irrelevant to biodiversity, underscoring the importance of relevance filtering. At the pandemic's onset, we observed increased volume and a significant sentiment shift toward horseshoe bats, which were implicated in the pandemic, but not for other focal taxa. The proposed methods open the door to conservation practitioners applying modern and emerging NLP tools, including LLMs "out of the box," to analyze public perceptions of biodiversity during current events or campaigns.
Combinatorial Attacks on Binarized Neural Networks
Oct 08, 2018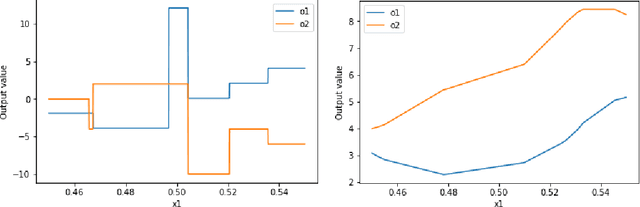
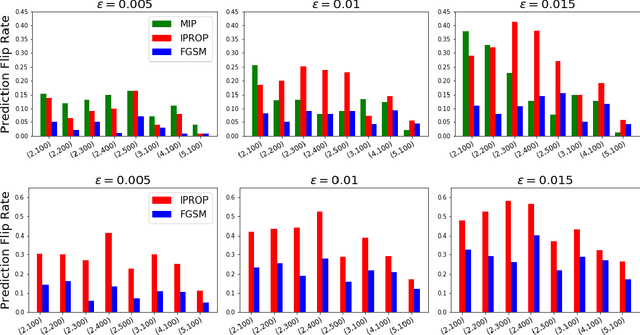
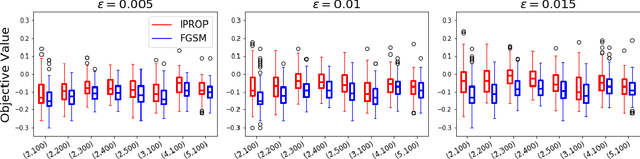
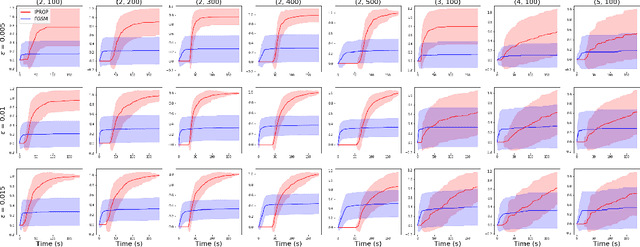
Binarized Neural Networks (BNNs) have recently attracted significant interest due to their computational efficiency. Concurrently, it has been shown that neural networks may be overly sensitive to "attacks" - tiny adversarial changes in the input - which may be detrimental to their use in safety-critical domains. Designing attack algorithms that effectively fool trained models is a key step towards learning robust neural networks. The discrete, non-differentiable nature of BNNs, which distinguishes them from their full-precision counterparts, poses a challenge to gradient-based attacks. In this work, we study the problem of attacking a BNN through the lens of combinatorial and integer optimization. We propose a Mixed Integer Linear Programming (MILP) formulation of the problem. While exact and flexible, the MILP quickly becomes intractable as the network and perturbation space grow. To address this issue, we propose IProp, a decomposition-based algorithm that solves a sequence of much smaller MILP problems. Experimentally, we evaluate both proposed methods against the standard gradient-based attack (FGSM) on MNIST and Fashion-MNIST, and show that IProp performs favorably compared to FGSM, while scaling beyond the limits of the MILP.
Hawkes Processes for Invasive Species Modeling and Management
Dec 12, 2017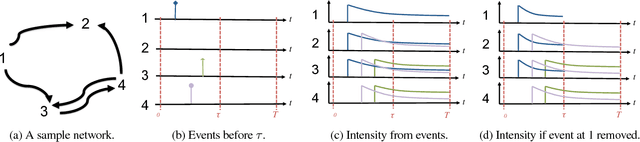
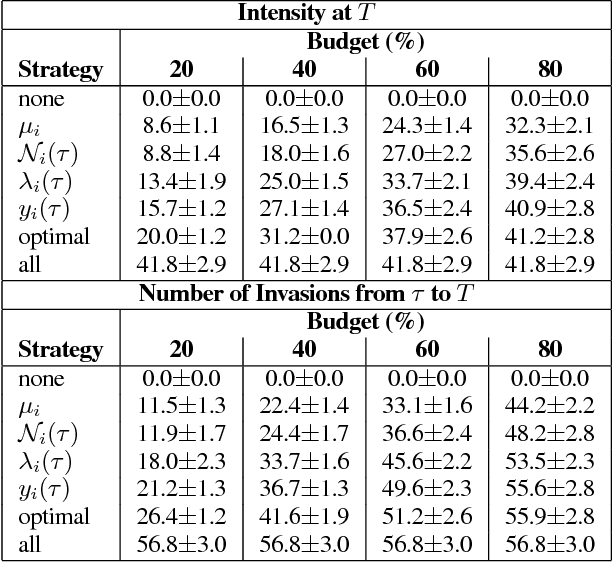
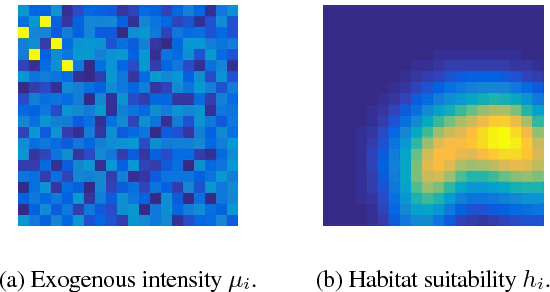
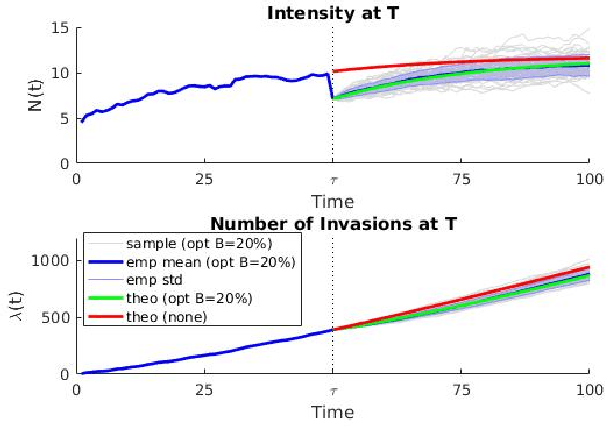
The spread of invasive species to new areas threatens the stability of ecosystems and causes major economic losses in agriculture and forestry. We propose a novel approach to minimizing the spread of an invasive species given a limited intervention budget. We first model invasive species propagation using Hawkes processes, and then derive closed-form expressions for characterizing the effect of an intervention action on the invasion process. We use this to obtain an optimal intervention plan based on an integer programming formulation, and compare the optimal plan against several ecologically-motivated heuristic strategies used in practice. We present an empirical study of two variants of the invasive control problem: minimizing the final rate of invasions, and minimizing the number of invasions at the end of a given time horizon. Our results show that the optimized intervention achieves nearly the same level of control that would be attained by completely eradicating the species, with a 20% cost saving. Additionally, we design a heuristic intervention strategy based on a combination of the density and life stage of the invasive individuals, and find that it comes surprisingly close to the optimized strategy, suggesting that this could serve as a good rule of thumb in invasive species management.