 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Generalization from Motion Demonstrations to New Tasks
Mar 16, 2026Learning motion policies from expert demonstrations is an essential paradigm in modern robotics. While end-to-end models aim for broad generalization, they require large datasets and computationally heavy inference. Conversely, learning dynamical systems (DS) provides fast, reactive, and provably stable control from very few demonstrations. However, existing DS learning methods typically model isolated tasks and struggle to reuse demonstrations for novel behaviors. In this work, we formalize the problem of combining isolated demonstrations within a shared workspace to enable generalization to unseen tasks. The Gaussian Graph is introduced, which reinterprets spatial components of learned motion primitives as discrete vertices with connections to one another. This formulation allows us to bridge continuous control with discrete graph search. We propose two frameworks leveraging this graph: Stitching, for constructing time-invariant DSs, and Chaining, giving a sequence-based DS for complex motions while retaining convergence guarantees. Simulations and real-robot experiments show that these methods successfully generalize to new tasks where baseline methods fail.
A Comparative Study of SMT and MILP for the Nurse Rostering Problem
May 15, 2025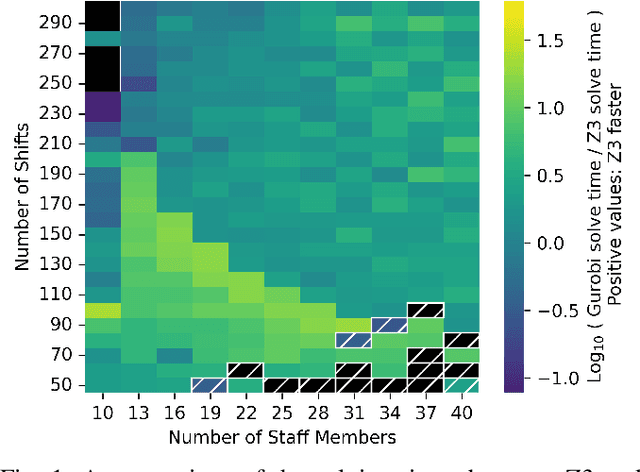
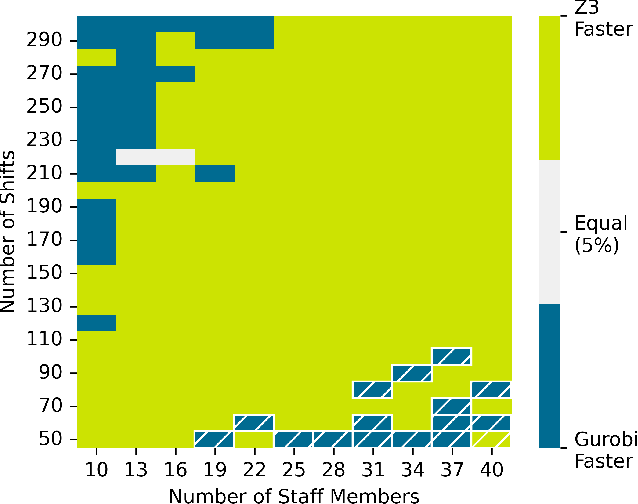
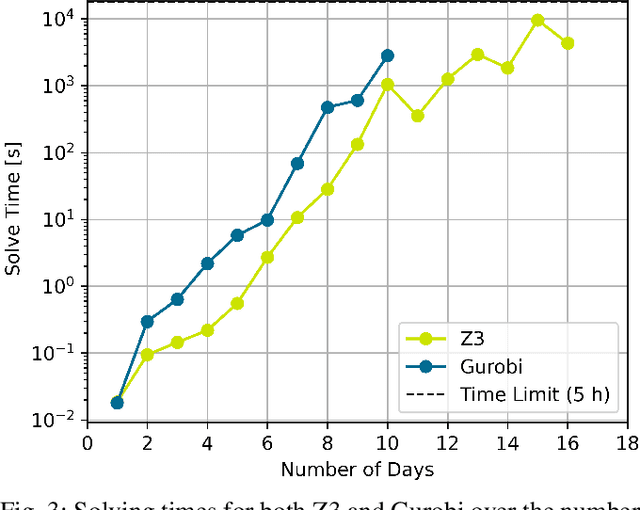
The effects of personnel scheduling on the quality of care and working conditions for healthcare personnel have been thoroughly documented. However, the ever-present demand and large variation of constraints make healthcare scheduling particularly challenging. This problem has been studied for decades, with limited research aimed at applying Satisfiability Modulo Theories (SMT). SMT has gained momentum within the formal verification community in the last decades, leading to the advancement of SMT solvers that have been shown to outperform standard mathematical programming techniques. In this work, we propose generic constraint formulations that can model a wide range of real-world scheduling constraints. Then, the generic constraints are formulated as SMT and MILP problems and used to compare the respective state-of-the-art solvers, Z3 and Gurobi, on academic and real-world inspired rostering problems. Experimental results show how each solver excels for certain types of problems; the MILP solver generally performs better when the problem is highly constrained or infeasible, while the SMT solver performs better otherwise. On real-world inspired problems containing a more varied set of shifts and personnel, the SMT solver excels. Additionally, it was noted during experimentation that the SMT solver was more sensitive to the way the generic constraints were formulated, requiring careful consideration and experimentation to achieve better performance. We conclude that SMT-based methods present a promising avenue for future research within the domain of personnel scheduling.