 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDREAM Lite: Simplifying Robot Assisted Therapy for ASD
Apr 16, 2021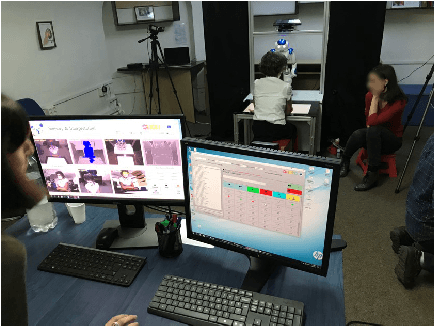
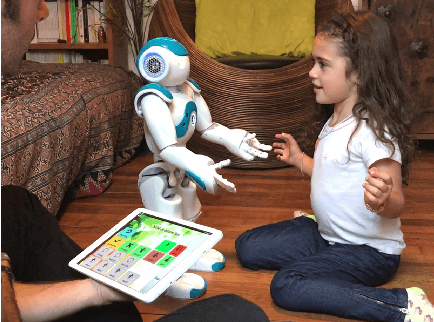
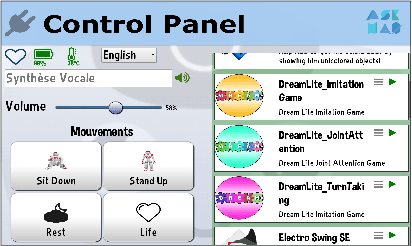
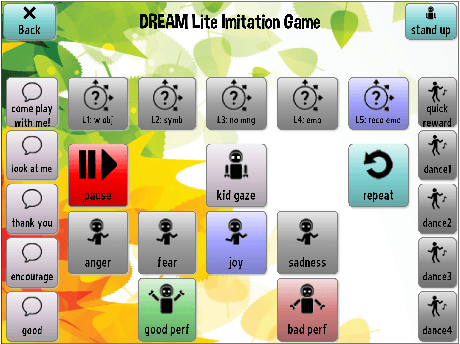
Robot-Assisted Therapy (RAT) has successfully been used to improve social skills in children with autism spectrum disorders (ASD). The DREAM project explores how to deliver effective RAT interventions to ASD children within a supervisedautonomy framework for controlling the robotic agent, which could decrease the burden on the clinicians delivering such interventions. In this paper we describe how to use in real life settings the experimental protocols that were developed and extensively tested in the DREAM Project, as well as their deployment and validation in a new ecological study conducted by clinicians.
MuMMER: Socially Intelligent Human-Robot Interaction in Public Spaces
Sep 15, 2019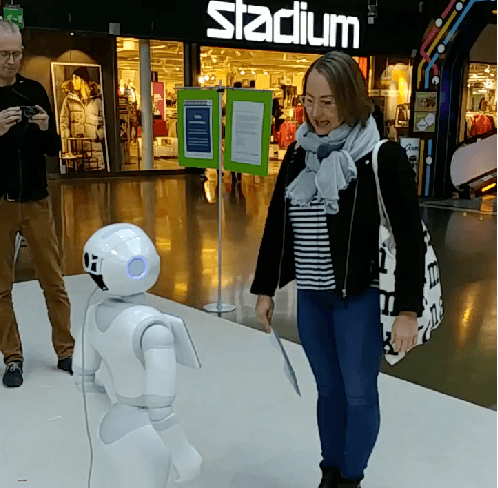
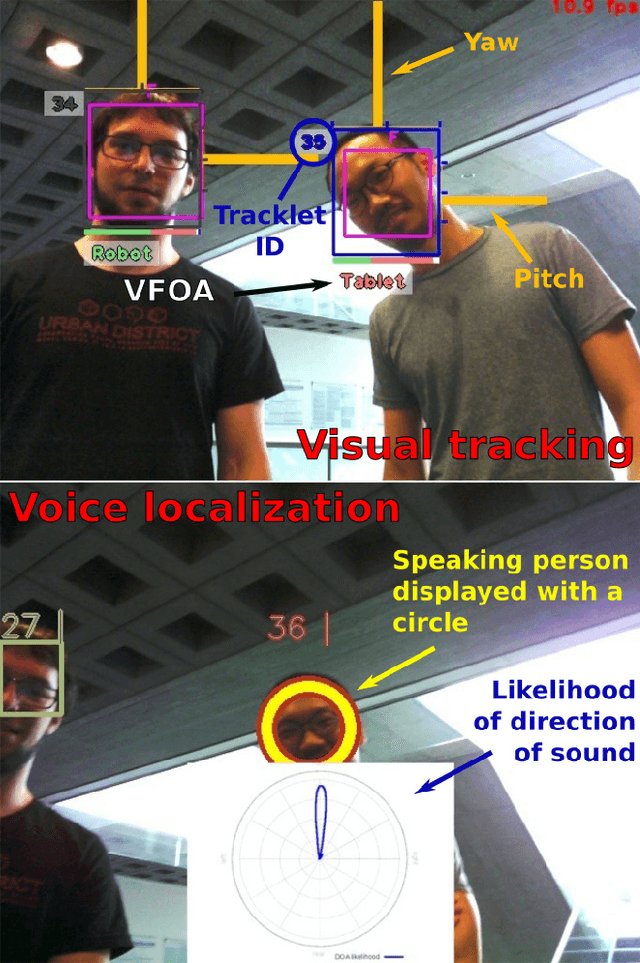
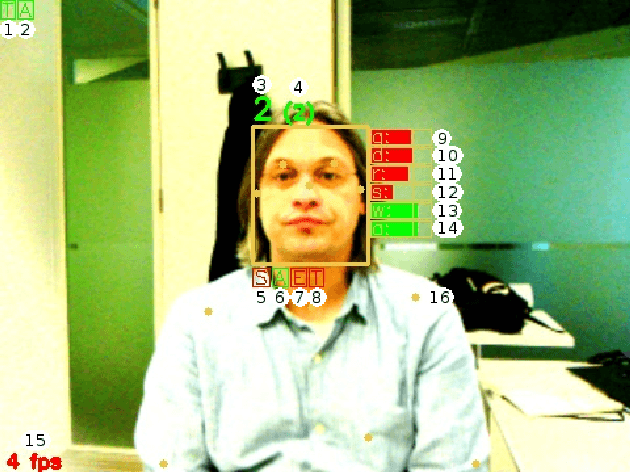
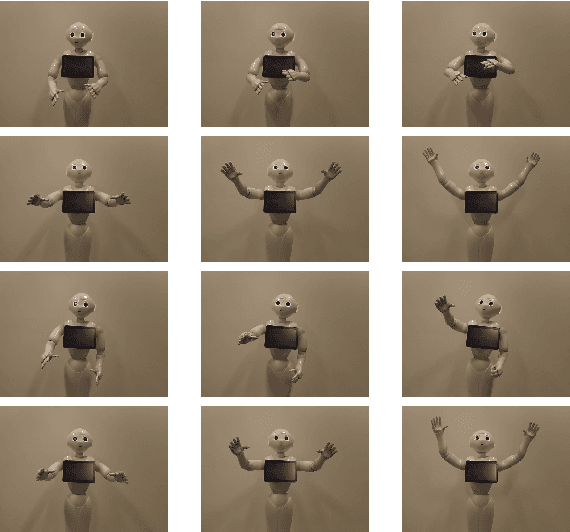
In the EU-funded MuMMER project, we have developed a social robot designed to interact naturally and flexibly with users in public spaces such as a shopping mall. We present the latest version of the robot system developed during the project. This system encompasses audio-visual sensing, social signal processing, conversational interaction, perspective taking, geometric reasoning, and motion planning. It successfully combines all these components in an overarching framework using the Robot Operating System (ROS) and has been deployed to a shopping mall in Finland interacting with customers. In this paper, we describe the system components, their interplay, and the resulting robot behaviours and scenarios provided at the shopping mall.