 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft Robotic Demonstration in the Stratosphere
Mar 04, 2026Machines designed for operation in Space, as well as other extreme environments, need to be both resilient and adaptable when mission parameters change. Soft robots offer advantages in adaptability, but most lack resilience to the pressure and temperature extremes found as close as the Stratosphere. Dielectric elastomer actuators overcome some of those limitations when built as solid state compliant capacitors capable of converting electrical energy into mechanical work, but the elastomer resilience limits the device's operating window. Here we present a crosslinking mechanism for silicone elastomers under ultraviolet light using trimethyl(methylcyclopentadienyl)platinum(IV) as a catalyst to react hydrosilane to vinyl groups. The formation of carbon-carbon bonds enables fast processing under UV light and exceptional electro-mechanical performance in dielectric elastomer actuators. The material resilience advantage is demonstrated in controlled experiments at -40° and 120° C, as well as near vacuum, in comparison with state-of-the-art acrylic and silicone chemistries. Fully autonomous systems controlling grippers made with the novel silicone were integrated into payloads for high altitude balloon testing. Two stratospheric balloon missions were carried out and demonstrated DEAs as a viable soft robotic technology under space-like conditions (as high as 23.6 km elevation, at <0.05 atm and -55° C). The combinations of chemical building blocks and catalyst can be further expanded to address other challenges for silicones, including adhesion and additive manufacturing.
A Robotic Testing Platform for Pipelined Discovery of Resilient Soft Actuators
Feb 24, 2026Short lifetime under high electrical fields hinders the widespread robotic application of linear dielectric elastomer actuators (DEAs). Systematic scanning is difficult due to time-consuming per-sample testing and the high-dimensional parameter space affecting performance. To address this, we propose an optimization pipeline enabled by a novel testing robot capable of scanning DEA lifetime. The robot integrates electro-mechanical property measurement, programmable voltage input, and multi-channel testing capacity. Using it, we scanned the lifetime of Elastosil-based linear actuators across parameters including input voltage magnitude, frequency, electrode material concentration, and electrical connection filler. The optimal parameter combinations improved operational lifetime under boundary operating conditions by up to 100% and were subsequently scaled up to achieve higher force and displacement output. The final product demonstrated resilience on a modular, scalable quadruped walking robot with payload carrying capacity (>100% of its untethered body weight, and >700% of combined actuator weight). This work is the first to introduce a self-driving lab approach into robotic actuator design.
Powder-Bot: A Modular Autonomous Multi-Robot Workflow for Powder X-Ray Diffraction
Sep 01, 2023Powder X-ray diffraction (PXRD) is a key technique for the structural characterisation of solid-state materials, but compared with tasks such as liquid handling, its end-to-end automation is highly challenging. This is because coupling PXRD experiments with crystallisation comprises multiple solid handling steps that include sample recovery, sample preparation by grinding, sample mounting and, finally, collection of X-ray diffraction data. Each of these steps has individual technical challenges from an automation perspective, and hence no commercial instrument exists that can grow crystals, process them into a powder, mount them in a diffractometer, and collect PXRD data in an autonomous, closed-loop way. Here we present an automated robotic workflow to carry out autonomous PXRD experiments. The PXRD data collected for polymorphs of small organic compounds is comparable to that collected under the same conditions manually. Beyond accelerating PXRD experiments, this workflow involves 13 component steps and integrates three different types of robots, each from a separate supplier, illustrating the power of flexible, modular automation in complex, multitask laboratories.
POPPINS : A Population-Based Digital Spiking Neuromorphic Processor with Integer Quadratic Integrate-and-Fire Neurons
Jan 19, 2022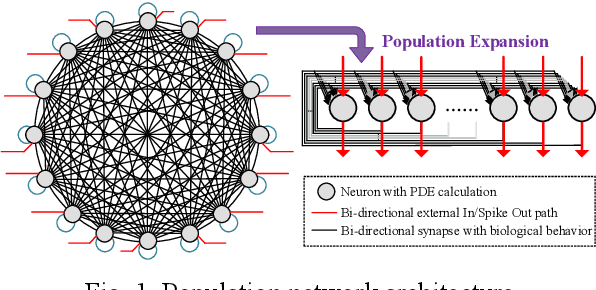
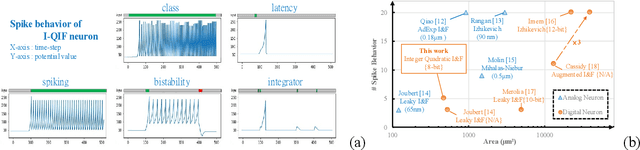
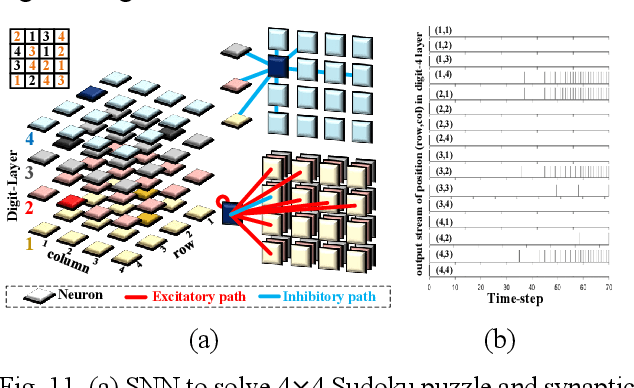
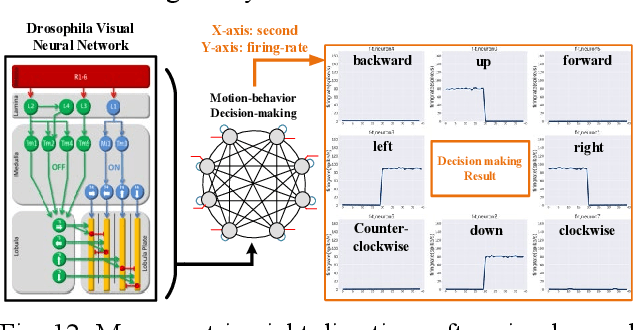
The inner operations of the human brain as a biological processing system remain largely a mystery. Inspired by the function of the human brain and based on the analysis of simple neural network systems in other species, such as Drosophila, neuromorphic computing systems have attracted considerable interest. In cellular-level connectomics research, we can identify the characteristics of biological neural network, called population, which constitute not only recurrent fullyconnection in network, also an external-stimulus and selfconnection in each neuron. Relying on low data bandwidth of spike transmission in network and input data, Spiking Neural Networks exhibit low-latency and low-power design. In this study, we proposed a configurable population-based digital spiking neuromorphic processor in 180nm process technology with two configurable hierarchy populations. Also, these neurons in the processor can be configured as novel models, integer quadratic integrate-and-fire neuron models, which contain an unsigned 8-bit membrane potential value. The processor can implement intelligent decision making for avoidance in real-time. Moreover, the proposed approach enables the developments of biomimetic neuromorphic system and various low-power, and low-latency inference processing applications.