 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-Target Tracking for Autonomous Vehicle Fleets
Apr 13, 2020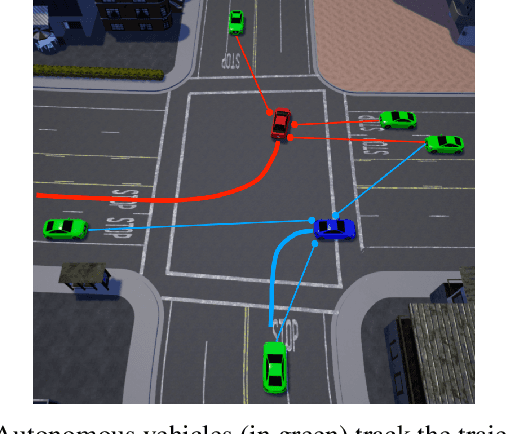
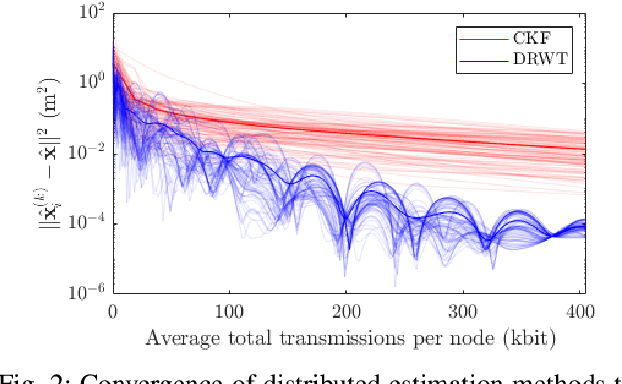
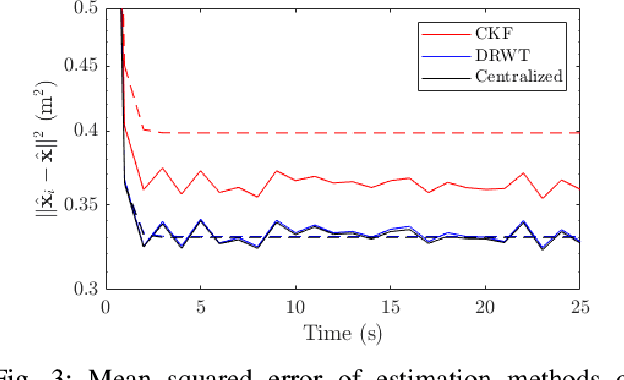
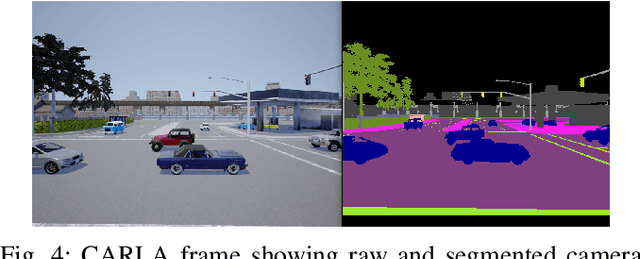
We present a scalable distributed target tracking algorithm based on the alternating direction method of multipliers that is well-suited for a fleet of autonomous cars communicating over a vehicle-to-vehicle network. Each sensing vehicle communicates with its neighbors to execute iterations of a Kalman filter-like update such that each agent's estimate approximates the centralized maximum a posteriori estimate without requiring the communication of measurements. We show that our method outperforms the Consensus Kalman Filter in recovering the centralized estimate given a fixed communication bandwidth. We also demonstrate the algorithm in a high fidelity urban driving simulator (CARLA), in which 50 autonomous cars connected on a time-varying communication network track the positions and velocities of 50 target vehicles using on-board cameras.