 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgefMPI: Fast Novel View Synthesis in the Wild with Layered Scene Representations
Dec 26, 2023



In this study, we propose two novel input processing paradigms for novel view synthesis (NVS) methods based on layered scene representations that significantly improve their runtime without compromising quality. Our approach identifies and mitigates the two most time-consuming aspects of traditional pipelines: building and processing the so-called plane sweep volume (PSV), which is a high-dimensional tensor of planar re-projections of the input camera views. In particular, we propose processing this tensor in parallel groups for improved compute efficiency as well as super-sampling adjacent input planes to generate denser, and hence more accurate scene representation. The proposed enhancements offer significant flexibility, allowing for a balance between performance and speed, thus making substantial steps toward real-time applications. Furthermore, they are very general in the sense that any PSV-based method can make use of them, including methods that employ multiplane images, multisphere images, and layered depth images. In a comprehensive set of experiments, we demonstrate that our proposed paradigms enable the design of an NVS method that achieves state-of-the-art on public benchmarks while being up to $50x$ faster than existing state-of-the-art methods. It also beats the current forerunner in terms of speed by over $3x$, while achieving significantly better rendering quality.
NeuralPassthrough: Learned Real-Time View Synthesis for VR
Jul 05, 2022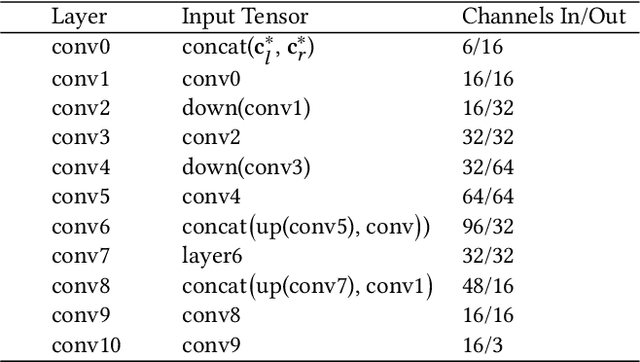
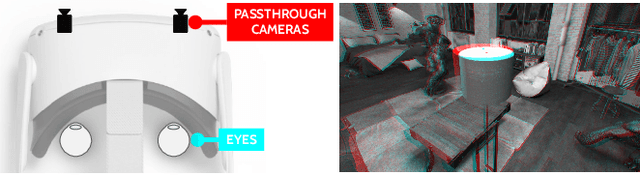
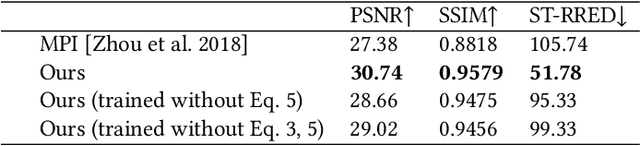
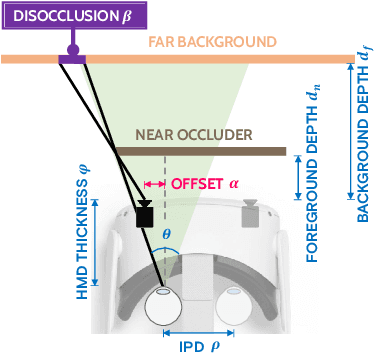
Virtual reality (VR) headsets provide an immersive, stereoscopic visual experience, but at the cost of blocking users from directly observing their physical environment. Passthrough techniques are intended to address this limitation by leveraging outward-facing cameras to reconstruct the images that would otherwise be seen by the user without the headset. This is inherently a real-time view synthesis challenge, since passthrough cameras cannot be physically co-located with the eyes. Existing passthrough techniques suffer from distracting reconstruction artifacts, largely due to the lack of accurate depth information (especially for near-field and disoccluded objects), and also exhibit limited image quality (e.g., being low resolution and monochromatic). In this paper, we propose the first learned passthrough method and assess its performance using a custom VR headset that contains a stereo pair of RGB cameras. Through both simulations and experiments, we demonstrate that our learned passthrough method delivers superior image quality compared to state-of-the-art methods, while meeting strict VR requirements for real-time, perspective-correct stereoscopic view synthesis over a wide field of view for desktop-connected headsets.