 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssistants, Not Architects: The Role of LLMs in Networked Systems Design
Apr 28, 2026Designing the architecture of modern networked systems requires navigating a large, combinatorial space of hardware, systems, and configuration choices with complex cross-layer interactions. Architects must balance competing objectives such as performance, cost, and deployability while satisfying compatibility and resource constraints, often relying on scattered rules-of-thumb drawn from benchmarks, papers, documentation, and expert experience. This raises a natural question: can large language models (LLMs) reliably perform this kind of architectural reasoning? We find that they cannot. While LLMs produce plausible configurations, they frequently miss critical constraints, encode incorrect assumptions, and exhibit ``stickiness'' to familiar patterns. A natural workaround--iterative validation via simulation or experimentation--is often prohibitively expensive at scale and, in many cases, infeasible, particularly when comparing hardware-dependent alternatives. Motivated by this gap, we present Kepler, a lightweight reasoning framework for architecture design that combines structured, expert-driven specifications with SMT-based optimization. Kepler encodes architecturally significant properties--requirements, incompatibilities, and qualitative trade-offs--about systems, hardware, and workloads as constraints, and synthesizes feasible designs that optimize user-defined objectives. It operates at an abstract level, capturing ``rules-of-thumb'' rather than detailed system behavior, enabling tractable reasoning while preserving key interactions, and provides explanations for its decisions. Through experiments and case studies, we show that Kepler uncovers interactions missed by LLMs and supports systematic, explainable design exploration.
Throughput-Fairness Tradeoffs in Mobility Platforms
May 25, 2021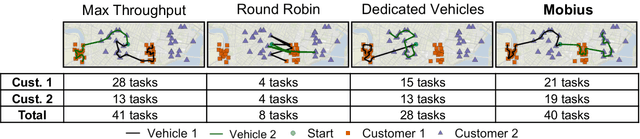
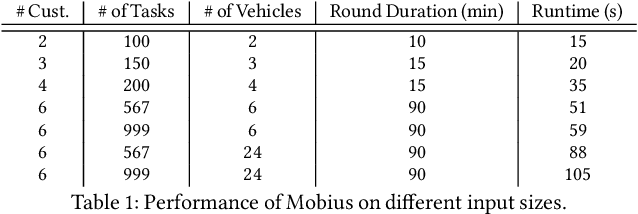
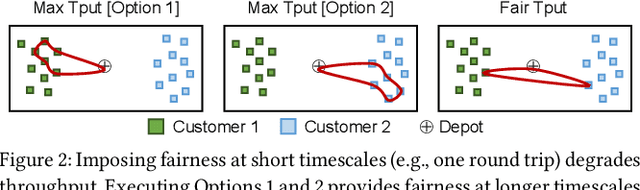
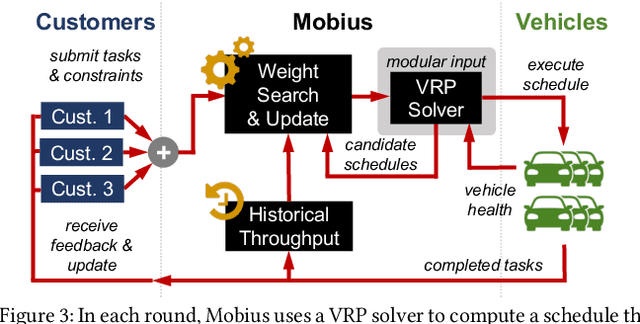
This paper studies the problem of allocating tasks from different customers to vehicles in mobility platforms, which are used for applications like food and package delivery, ridesharing, and mobile sensing. A mobility platform should allocate tasks to vehicles and schedule them in order to optimize both throughput and fairness across customers. However, existing approaches to scheduling tasks in mobility platforms ignore fairness. We introduce Mobius, a system that uses guided optimization to achieve both high throughput and fairness across customers. Mobius supports spatiotemporally diverse and dynamic customer demands. It provides a principled method to navigate inherent tradeoffs between fairness and throughput caused by shared mobility. Our evaluation demonstrates these properties, along with the versatility and scalability of Mobius, using traces gathered from ridesharing and aerial sensing applications. Our ridesharing case study shows that Mobius can schedule more than 16,000 tasks across 40 customers and 200 vehicles in an online manner.
On Realistic Target Coverage by Autonomous Drones
Sep 05, 2018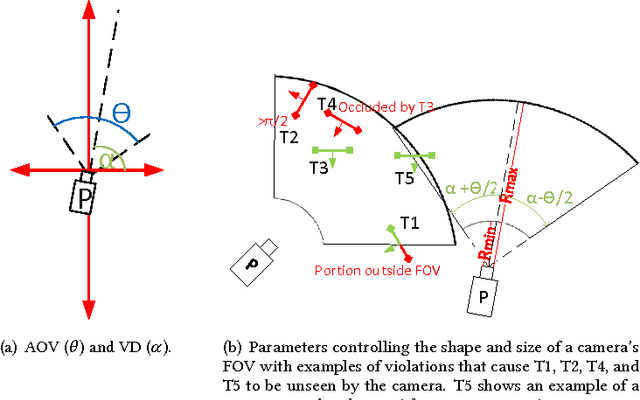
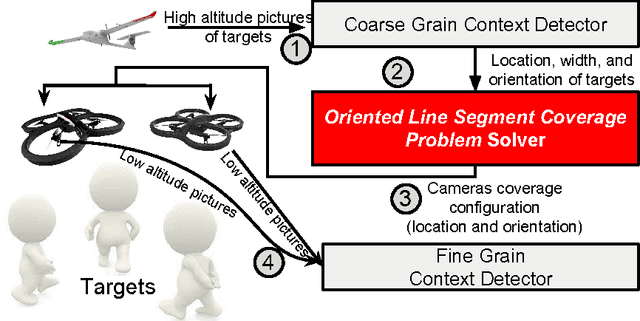
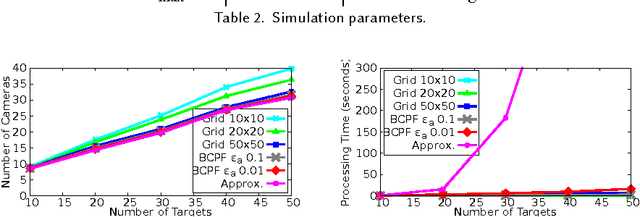
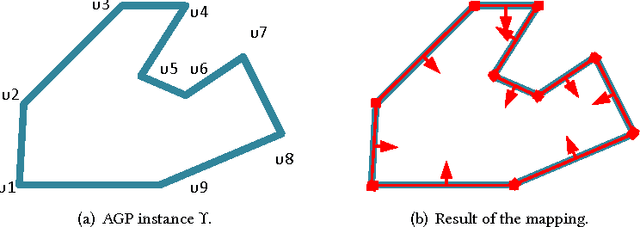
Low-cost mini-drones with advanced sensing and maneuverability enable a new class of intelligent sensing systems. To achieve the full potential of such drones, it is necessary to develop new enhanced formulations of both common and emerging sensing scenarios. Namely, several fundamental challenges in visual sensing remain unsolved including: 1) Fitting sizable targets in camera frames; 2) Effective viewpoints matching target poses; 3) Occlusion by elements in the environment, including other targets. In this paper, we introduce Argus: an autonomous system that utilizes drones to incrementally collect target information through a two-tier architecture. To tackle the stated challenges, Argus employs a novel geometric model that captures both target shapes and coverage constraints. Recognizing drones as the scarcest resource, Argus aims to minimize the number of drones required to cover a set of targets. We prove this problem is NP-hard, and even hard to approximate, before deriving a best-possible approximation algorithm along with a competitive sampling heuristic which runs up to 100x faster according to large-scale simulations. To test Argus in action, we demonstrate and analyze its performance on a prototype implementation. Finally, we present a number of extensions to accommodate more application requirements and highlight some open problems.
RASID: A Robust WLAN Device-free Passive Motion Detection System
Feb 12, 2012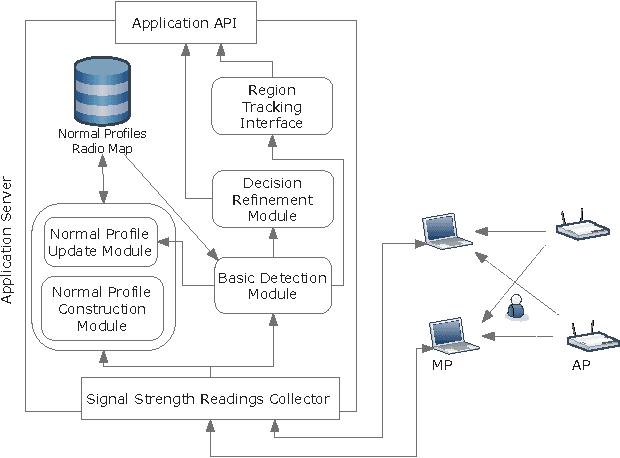
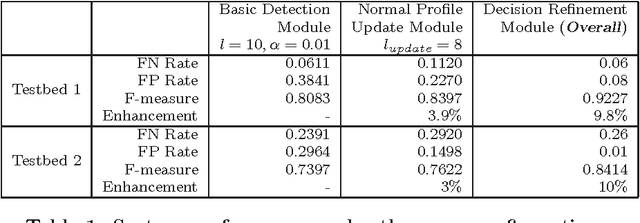
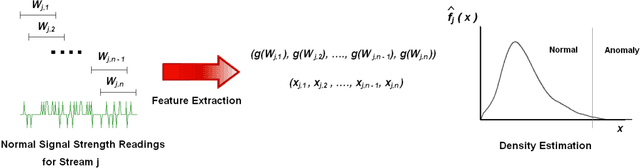
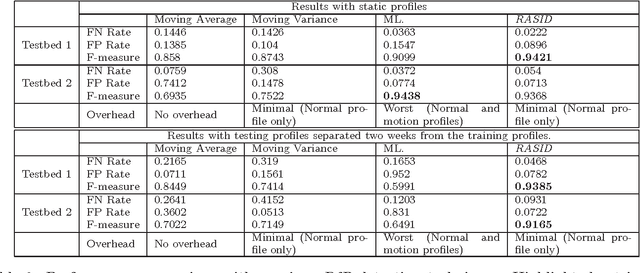
WLAN Device-free passive DfP indoor localization is an emerging technology enabling the localization of entities that do not carry any devices nor participate actively in the localization process using the already installed wireless infrastructure. This technology is useful for a variety of applications such as intrusion detection, smart homes and border protection. We present the design, implementation and evaluation of RASID, a DfP system for human motion detection. RASID combines different modules for statistical anomaly detection while adapting to changes in the environment to provide accurate, robust, and low-overhead detection of human activities using standard WiFi hardware. Evaluation of the system in two different testbeds shows that it can achieve an accurate detection capability in both environments with an F-measure of at least 0.93. In addition, the high accuracy and low overhead performance are robust to changes in the environment as compared to the current state of the art DfP detection systems. We also relay the lessons learned during building our system and discuss future research directions.