 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChimera: A Block-Based Neural Architecture Search Framework for Event-Based Object Detection
Dec 27, 2024



Event-based cameras are sensors that simulate the human eye, offering advantages such as high-speed robustness and low power consumption. Established Deep Learning techniques have shown effectiveness in processing event data. Chimera is a Block-Based Neural Architecture Search (NAS) framework specifically designed for Event-Based Object Detection, aiming to create a systematic approach for adapting RGB-domain processing methods to the event domain. The Chimera design space is constructed from various macroblocks, including Attention blocks, Convolutions, State Space Models, and MLP-mixer-based architectures, which provide a valuable trade-off between local and global processing capabilities, as well as varying levels of complexity. The results on the PErson Detection in Robotics (PEDRo) dataset demonstrated performance levels comparable to leading state-of-the-art models, alongside an average parameter reduction of 1.6 times.
A Recurrent YOLOv8-based framework for Event-Based Object Detection
Aug 09, 2024



Object detection is crucial in various cutting-edge applications, such as autonomous vehicles and advanced robotics systems, primarily relying on data from conventional frame-based RGB sensors. However, these sensors often struggle with issues like motion blur and poor performance in challenging lighting conditions. In response to these challenges, event-based cameras have emerged as an innovative paradigm. These cameras, mimicking the human eye, demonstrate superior performance in environments with fast motion and extreme lighting conditions while consuming less power. This study introduces ReYOLOv8, an advanced object detection framework that enhances a leading frame-based detection system with spatiotemporal modeling capabilities. We implemented a low-latency, memory-efficient method for encoding event data to boost the system's performance. We also developed a novel data augmentation technique tailored to leverage the unique attributes of event data, thus improving detection accuracy. Our models outperformed all comparable approaches in the GEN1 dataset, focusing on automotive applications, achieving mean Average Precision (mAP) improvements of 5%, 2.8%, and 2.5% across nano, small, and medium scales, respectively.These enhancements were achieved while reducing the number of trainable parameters by an average of 4.43% and maintaining real-time processing speeds between 9.2ms and 15.5ms. On the PEDRo dataset, which targets robotics applications, our models showed mAP improvements ranging from 9% to 18%, with 14.5x and 3.8x smaller models and an average speed enhancement of 1.67x.
A multilevel reinforcement learning framework for PDE based control
Oct 15, 2022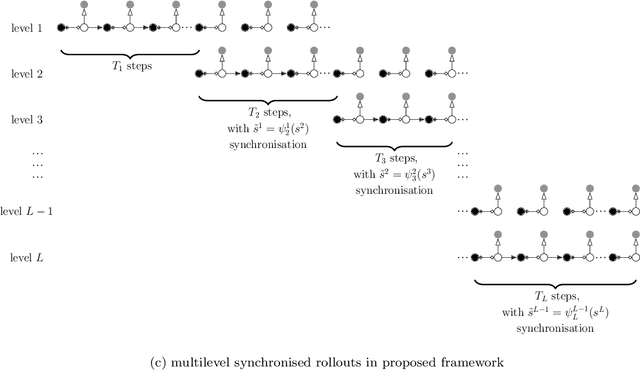
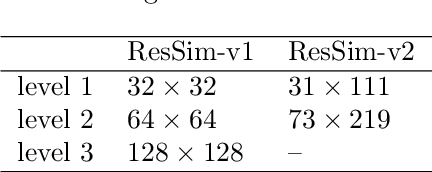
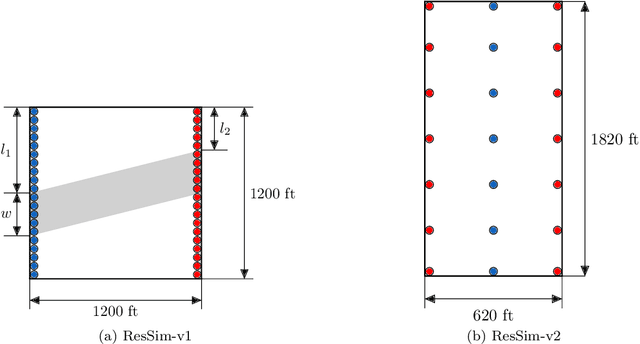
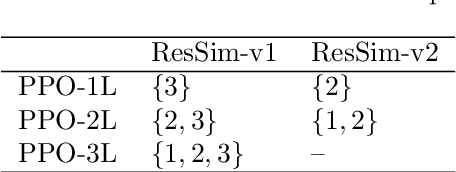
Reinforcement learning (RL) is a promising method to solve control problems. However, model-free RL algorithms are sample inefficient and require thousands if not millions of samples to learn optimal control policies. A major source of computational cost in RL corresponds to the transition function, which is dictated by the model dynamics. This is especially problematic when model dynamics is represented with coupled PDEs. In such cases, the transition function often involves solving a large-scale discretization of the said PDEs. We propose a multilevel RL framework in order to ease this cost by exploiting sublevel models that correspond to coarser scale discretization (i.e. multilevel models). This is done by formulating an approximate multilevel Monte Carlo estimate of the objective function of the policy and / or value network instead of Monte Carlo estimates, as done in the classical framework. As a demonstration of this framework, we present a multilevel version of the proximal policy optimization (PPO) algorithm. Here, the level refers to the grid fidelity of the chosen simulation-based environment. We provide two examples of simulation-based environments that employ stochastic PDEs that are solved using finite-volume discretization. For the case studies presented, we observed substantial computational savings using multilevel PPO compared to its classical counterpart.
Deep learning for prediction of complex geology ahead of drilling
Apr 06, 2021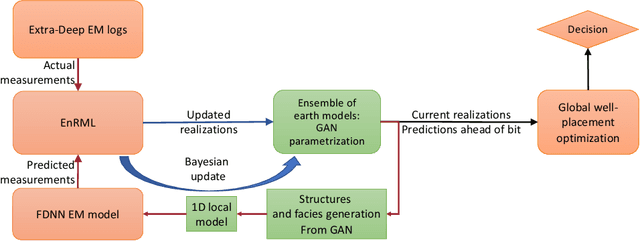
During a geosteering operation the well path is intentionally adjusted in response to the new data acquired while drilling. To achieve consistent high-quality decisions, especially when drilling in complex environments, decision support systems can help cope with high volumes of data and interpretation complexities. They can assimilate the real-time measurements into a probabilistic earth model and use the updated model for decision recommendations. Recently, machine learning (ML) techniques have enabled a wide range of methods that redistribute computational cost from on-line to off-line calculations. In this paper, we introduce two ML techniques into the geosteering decision support framework. Firstly, a complex earth model representation is generated using a Generative Adversarial Network (GAN). Secondly, a commercial extra-deep electromagnetic simulator is represented using a Forward Deep Neural Network (FDNN). The numerical experiments demonstrate that the combination of the GAN and the FDNN in an ensemble randomized maximum likelihood data assimilation scheme provides real-time estimates of complex geological uncertainty. This yields reduction of geological uncertainty ahead of the drill-bit from the measurements gathered behind and around the well bore.