 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisuotactile and Explicitly Force-Controlled Robotic Ultrasound for Abdominal Volumetric Reconstruction
Jun 04, 2026In this paper, we present a robotic ultrasound acquisition system that integrates stereo vision, touch-based feedback, and expert-informed strategies to perform autonomous and adaptive abdominal scans. The system records freehand motion and force data from expert radiologists, creating a framework to capture transducer motion, applied forces, and anatomical scanning strategies. This expert data is replayed to replicate characteristic scans with the robot, forming a foundation for further autonomous capabilities. Using stereo vision, the system generates three-dimensional topography maps of the patient's abdomen, which are refined through stiffness measurements at key points to delineate the rib cage boundary. These combined techniques enable the robot to execute two distinct scanning paths: an upward-angled sweep beneath the rib cage to visualize structures near the upper abdomen and a perpendicular sweep across soft tissue regions. A compliant, torque-controlled seven degree-of-freedom robotic manipulator is controlled to maintain consistent probe contact through closed-loop force control over the varied anatomical surfaces. Physical experiments demonstrate that the system achieves high-quality imaging comparable to expert scans while dynamically adapting to patient-specific topographies. Furthermore, the robotic system surpasses expert capabilities by enabling three-dimensional volume acquisition, which enhances diagnostic potential and provides volumetric data for advanced analyses. This work highlights the integration of expert knowledge into autonomous robotic systems and underscores the potential of combining perception-based autonomy with physical reasoning for enhanced diagnostic performance.
Elly: A Real-Time Failure Recovery and Data Collection System for Robotic Manipulation
Aug 25, 2022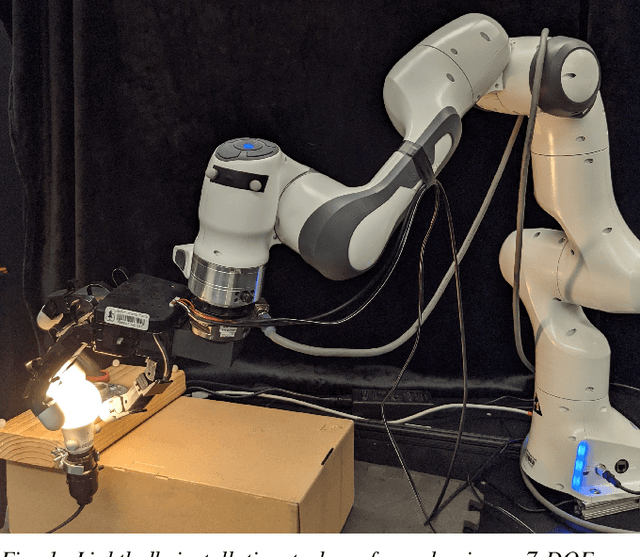
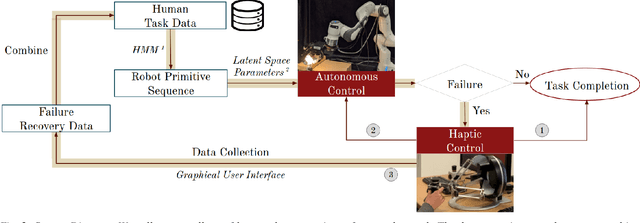
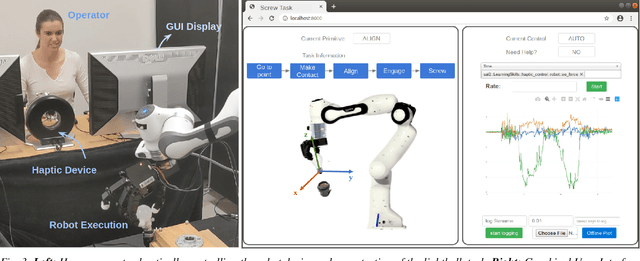
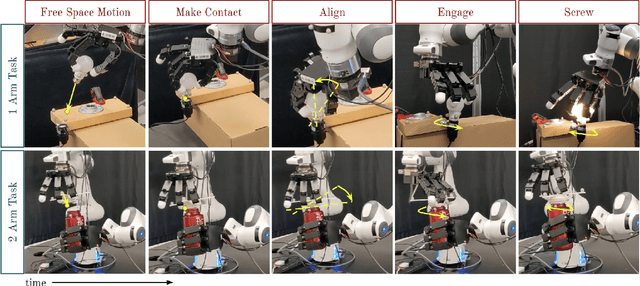
Even the most robust autonomous behaviors can fail. The goal of this research is to both recover and collect data from failures, during autonomous task execution, so they can be prevented in the future. We propose haptic intervention for real-time failure recovery and data collection. Elly is a system that allows for seamless transitions between autonomous robot behaviors and human intervention while collecting sensory information from the human's recovery strategy. The system and our design choices were experimentally validated on a single arm task -- installing a lightbulb in a socket -- and a bimanual task -- screwing a cap on a bottle -- using two 7-DOF manipulators equipped 4-finger grippers. In these examples, Elly achieved over 80% task completion during a total of 40 runs.