 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLASER: Level-Based Asynchronous Scheduling and Execution Regime for Spatiotemporally Constrained Multi-Robot Timber Manufacturing
Mar 21, 2026Automating large-scale manufacturing in domains like timber construction requires multi-robot systems to manage tightly coupled spatiotemporal constraints, such as collision avoidance and process-driven deadlines. This paper introduces LASER (Level-based Asynchronous Scheduling and Execution Regime), a complete framework for scheduling and executing complex assembly tasks, demonstrated on a screw-press gluing application for timber slab manufacturing. Our central contribution is to integrate a barrier-based mechanism into a constraint programming (CP) scheduling formulation that partitions tasks into spatiotemporally disjoint sets, which we define as levels. This structure enables robots to execute tasks in parallel and asynchronously within a level, synchronizing only at level barriers, which guarantees collision-free operation by construction and provides robustness to timing uncertainties. To solve this formulation for large problems, we propose two specialized algorithms: an iterative temporal-relaxation approach for heterogeneous task sequences and a bi-level decomposition for homogeneous tasks that balances workload. We validate the LASER framework by fabricating a full-scale 2.4m x 6m timber slab with a two-robot system mounted on parallel linear tracks, successfully coordinating 108 subroutines and 352 screws under tight adhesive time windows. Computational studies show our method scales steadily with size compared to a monolithic approach.
Robust Task and Motion Planning for Long-Horizon Architectural Construction Planning
Mar 17, 2020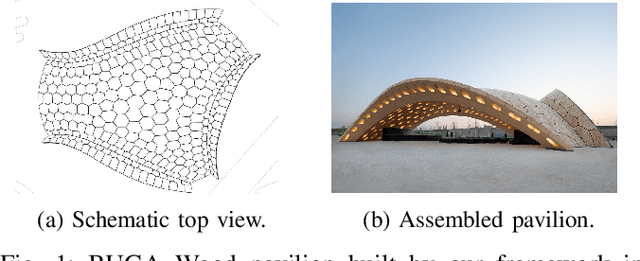
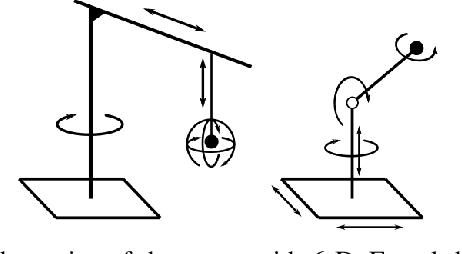
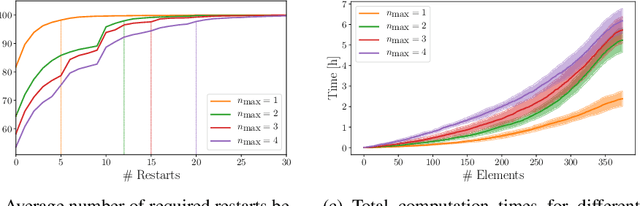
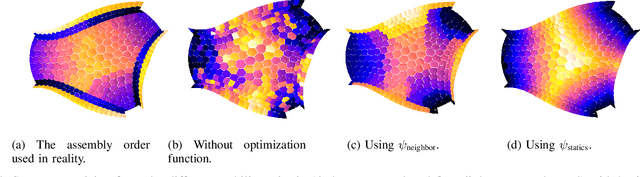
Integrating robotic systems in architectural and construction processes is of core interest to increase the efficiency of the building industry. Automated planning for such systems enables design analysis tools and facilitates faster design iteration cycles for designers and engineers. However, generic task-and-motion planning (TAMP) for long-horizon construction processes is beyond the capabilities of current approaches. In this paper, we develop a multi-agent TAMP framework for long horizon problems such as constructing a full-scale building. To this end we extend the Logic-Geometric Programming framework by sampling-based motion planning,a limited horizon approach, and a task-specific structural stability optimization that allow an effective decomposition of the task. We show that our framework is capable of constructing a large pavilion built from several hundred geometrically unique building elements from start to end autonomously.