 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced monitoring of rail breakage in double-track railway lines by means of PCA techniques
Feb 04, 2024This work describes a classifier designed to identify rail breakages in double-track railway lines, completing the electronic equipment carried out by authors. The main objective of this proposal is to guarantee the integrity of tracks before the railway traffic starts working. In addition, it facilitates maintenance tasks providing information about possible breakages. The detection of breakages is based on the analysis of eight currents provided by the electronic equipment, one per rail, at the ends of the section (emitting and receiving nodes). The imbalance that occurs among the value of these currents implies that there is at least a breakage in the track section under analysis. This analysis is conducted according to three phases. The first one identifies whether there is a breakage, and, in that case, the damaged track is identified. The second phase provides information about which rail is broken (internal, external or both of them) in the previously identified track. Finally, if there is only one breakage, the third phase estimates its most likely zone along the track section. This situation is considered as a classification problem, and solved by means of the Principal Component Analysis technique. This means that a significant number of measurements is required for every breakage pattern (types of breakages) to be considered. Due to the difficulty of having real data, the proposal has been validated using an 8km-long double-track hardware simulator specially designed by the authors, with specific localizations for breakages.
3D-DEEP: 3-Dimensional Deep-learning based on elevation patterns forroad scene interpretation
Sep 01, 2020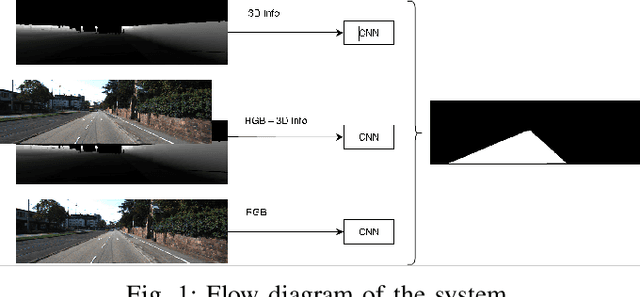
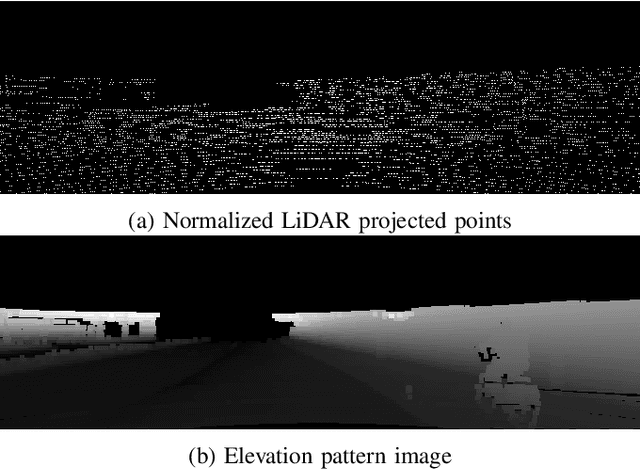
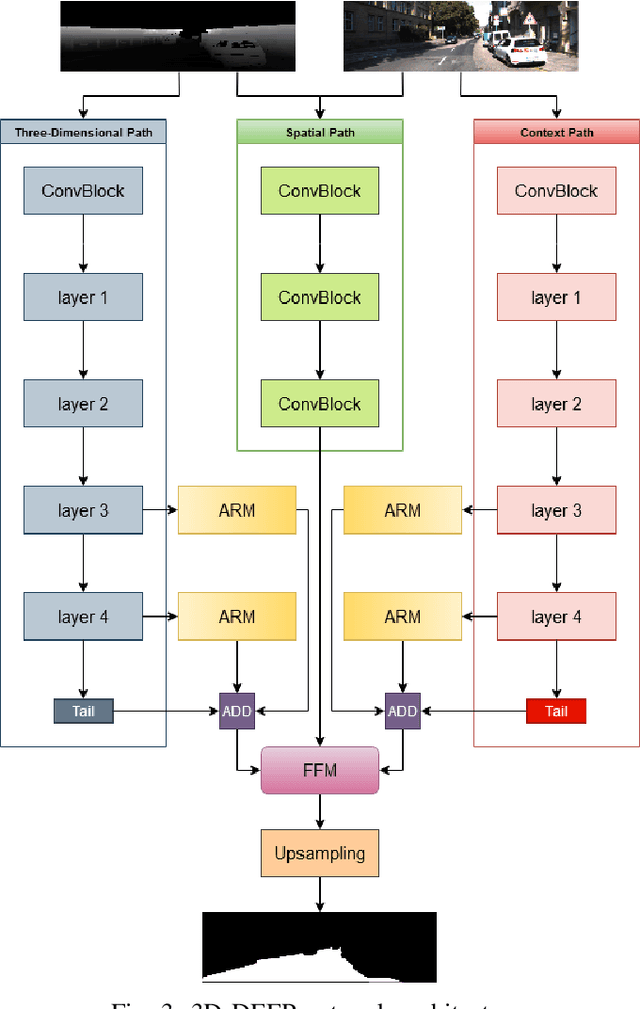
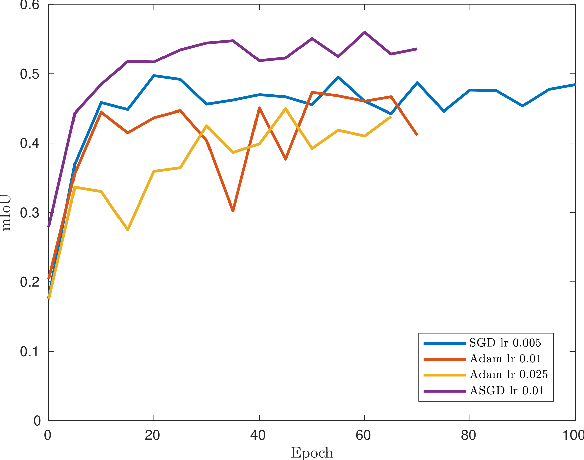
Road detection and segmentation is a crucial task in computer vision for safe autonomous driving. With this in mind, a new net architecture (3D-DEEP) and its end-to-end training methodology for CNN-based semantic segmentation are described along this paper for. The method relies on disparity filtered and LiDAR projected images for three-dimensional information and image feature extraction through fully convolutional networks architectures. The developed models were trained and validated over Cityscapes dataset using just fine annotation examples with 19 different training classes, and over KITTI road dataset. 72.32% mean intersection over union(mIoU) has been obtained for the 19 Cityscapes training classes using the validation images. On the other hand, over KITTIdataset the model has achieved an F1 error value of 97.85% invalidation and 96.02% using the test images.