 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLINS: A Lidar-Inerital State Estimator for Robust and Fast Navigation
Paper and Code
Jul 04, 2019
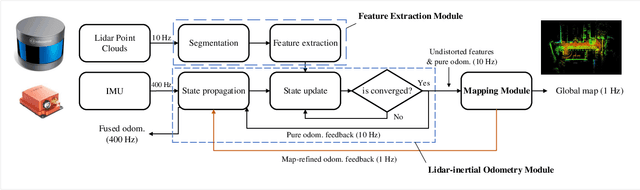
Robust and fast ego-motion estimation is a critical problem for autonomous robots. With high reliability and precision, 3D-lidar-based simultaneous localization and mapping (SLAM) has been widely used in the robotics community to solve this problem. However, the lidar alone is not enough to provide full autonomy to robot navigation in terms of robustness and operating scope, especially in feature-less scenes. In this paper, we present LINS: a lidar-inertial state estimator for robust and fast navigation. Our approach tightly couples the 3D lidar and the inertial measurement unit (IMU) by an iterative error-state Kalman filter (IESKF). To validate generalizability and long-time practicability, extensive experiments are performed in a variety of scenarios including the city, port, forest, and parking lot. The results indicate that LINS outperforms the lidar-only methods in terms of accuracy and it is faster than the state-of-the-art lidar-inertial fusion methods in nearly an order of magnitude.